
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣
ą¦čĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ą▓ą░ąČąĮčŗą╝ čÅą▓ą╗čÅąĄčéčüčÅ ąĘąĮą░ąĮąĖąĄ čäą░ą║čéąĖč湥čüą║ąŠą╣ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ (ąöąØ) ą╗čÄą▒ąŠą╣ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠą╣ ą░ąĮč鹥ąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ. ążą░ą║čéąĖč湥čüą║ą░čÅ ąöąØ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ąĮąŠą│ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą░ąĮč鹥ąĮąĮąŠ-čäąĖą┤ąĄčĆąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąĄčüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čäą░ą║čéąĖč湥čüą║ąŠą╣ ąĖ čĆą░čüč湥čéąĮąŠą╣ ąöąØ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą║ąŠąĮčüčéčĆčāą║čéąĖą▓ąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą░ąĮč鹥ąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĖą╗ąĖ ąĮą░ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖąĄ ą┐čĆąĖ ą╝ąŠąĮčéą░ąČąĄ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ.
ą¤ąŠčŹč鹊ą╝čā ą▒ąŠą╗čīčłąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ čāą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą▒ąŠą╗čīčłąĖčģ čüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ ą░ąĮč鹥ąĮąĮ čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąŠą▒ą╗ąĄčéąĮčŗą╝ąĖ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ąŠą╗ąĖą│ąŠąĮą░.
ąŚą░čĆąŠąČą┤ąĄąĮąĖąĄ ą╝ąĄčéčĆąŠą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▓ ą┐čĆąŠčåąĄčüčüą░čģ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖčÅ ąĖ ąĖčüą┐čŗčéą░ąĮąĖą╣ ą░ąĮč鹥ąĮąĮ čüą╗ąĄą┤čāąĄčé ąŠčéąĮąĄčüčéąĖ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąÜąæąĀą¤ ąĖą╝. ą░ą║ą░ą┤ąĄą╝ąĖą║ą░ ąÉ.ąÉ. ąĀą░čüą┐ą╗ąĄčéąĖąĮą░ (1970-ąĄ ą│ą│.).
ą¤čĆąĖ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą░ąĮč鹥ąĮąĮčŗ ąĀąøąĪ ą▓ ąŻąÜąÆ-ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą▓ ąĪąĪąĪąĀ ą┐čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą┐ą╗ąĄą║čüčŗ ąĮą░ ą▒ą░ąĘąĄ čüą░ą╝ąŠą╗ąĄč鹊ą▓ ąśą╗-14 ąĖ ąÉąĮ-12.
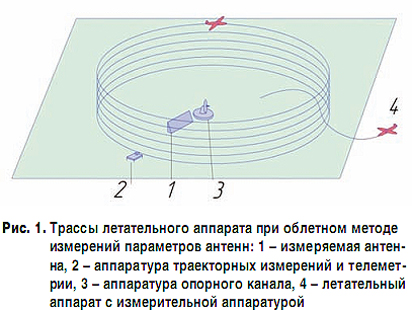
ąÜąŠąĮčüčéčĆčāą║čåąĖčÅ ą░ąĮč鹥ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ č乊čĆą╝ąĖčĆčāąĄą╝ąŠą╣ ąĖą╝ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅą╗ąĖ čüą┐ąŠčüąŠą▒ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ąĖą░ą│čĆą░ą╝ą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ ą▓ ąŠą▒ą╗ąĄčéąĮąŠą╝ ą╝ąĄč鹊ą┤ąĄ. ąöą╗čÅ ą░ąĮč鹥ąĮąĮčŗ, č乊čĆą╝ąĖčĆčāčÄčēąĄą╣ čüą╗ąŠąČąĮčāčÄ ą┤ąĖą░ą│čĆą░ą╝ą╝čā ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ ą▓ ąĘą░ą┤ą░ąĮąĮąŠą╝ čüąĄą║č鹊čĆąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐čĆąĖ čāą│ą╗ą░čģ ą╝ąĄčüčéą░ ąĮąĄ ą▒ąŠą╗ąĄąĄ 50ŌĆō60 ą│čĆą░ą┤., ąĖąĘą╝ąĄčĆčÅą╗ąĖčüčī ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮčŗąĄ čüąĄč湥ąĮąĖčÅ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ ą╗ąĄčéą░č鹥ą╗čīąĮčŗą╣ ą░ą┐ą┐ą░čĆą░čé čüąŠą▓ąĄčĆčłą░ą╗ ą┐čĆąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ ą▓čŗčüąŠč鹥 ą║čĆčāą│ąŠą▓ąŠą╣ ąŠą▒ą╗ąĄčé ą░ąĮč鹥ąĮąĮčŗ. ąŻą┤ą░ą╗ąĄąĮąĖąĄ ą╗ąĄčéą░č鹥ą╗čīąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéą░ ąŠčé ą░ąĮč鹥ąĮąĮčŗ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓čŗą┤ąĄčƹȹĖą▓ą░ą╗ąŠčüčī ą▒ą╗ąĖąĘą║ąĖą╝ ą║ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą┐čĆąĖ ą▒ąŠą╗čīčłąŠą╝ ąŠą▒čēąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐čĆąĖą╝ąĄąĮčÅą╗čüčÅ ąŠą┐ąŠčĆąĮčŗą╣ ą║ą░ąĮą░ą╗.
ąĀąĄąĘčÄą╝ąĖčĆčāčÅ ą▓ čåąĄą╗ąŠą╝ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąŠą▒ą╗ąĄčéąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą║čĆčāą┐ąĮąŠą░ą┐ąĄčĆčéčāčĆąĮčŗčģ ą░ąĮč鹥ąĮąĮ ą▓ ąĪąĪąĪąĀ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▒ąŠą╗čīčłąŠą╣ ąŠą▒čŖąĄą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣, ą░ čéą░ą║ąČąĄ čĆą░ą▒ąŠčé ą┐ąŠ ąĮąĄą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą┤ąĄą╗ą░ą╗ąĖ ąŠą▒ą╗ąĄčéąĮčŗą╣ ą╝ąĄč鹊ą┤ ąŠą┤ąĮąĖą╝ ąĖąĘ čüą░ą╝čŗčģ č鹥čģąĮąĖč湥čüą║ąĖ čüą╗ąŠąČąĮčŗčģ [1].
ąØą░čłą░ čĆą░ą▒ąŠčéą░ ą┐ąŠčüą▓čÅčēąĄąĮą░ ą▓ąŠą┐čĆąŠčüą░ą╝ ą╝ąĄčéčĆąŠą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą║čĆčāą┐ąĮąŠą│ą░ą▒ą░čĆąĖčéąĮčŗčģ čüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ ą░ąĮč鹥ąĮąĮ, ąĖ ą│ą╗ą░ą▓ąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝ ą╝ąĄč鹊ą┤ą░, ą┐čĆąĖą╝ąĄąĮčÅą▓čłąĄą│ąŠčüčÅ ą▓ ąĪąĪąĪąĀ.
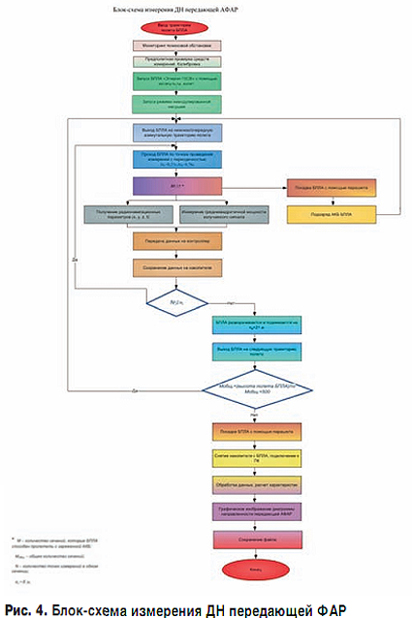
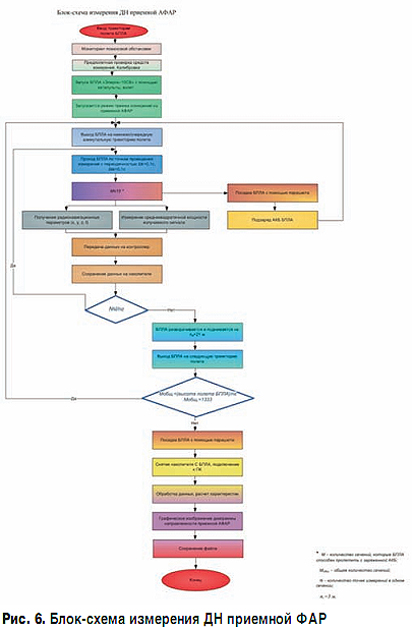
ąĪą┐ąĄčåąĖčäąĖą║ą░ ą┤ą░ąĮąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ čéčĆąĄą▒čāąĄčé ą▓ąĮąĄą┤čĆąĄąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ ą▓čüąĄčģ čŹčéą░ą┐ąŠą▓ čĆą░ą▒ąŠčé ŌĆō ąŠčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĄčéą░ą╝ąĖ, ą┐čĆąŠą▓ąĄą┤ąĄąĮąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┤ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ ą░ąĮč鹥ąĮąĮčŗ.

ąōą╗ą░ą▓ąĮčŗą╝ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠą╝ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąæą¤ąøąÉ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą┐ąĖą╗ąŠčéąĖčĆčāąĄą╝čŗą╝ąĖ ą╗ąĄčéą░č鹥ą╗čīąĮčŗą╝ąĖ ą░ą┐ą┐ą░čĆą░čéą░ą╝ąĖ čÅą▓ą╗čÅąĄčéčüčÅ č鹊, čćč鹊 ąŠąĮąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠč鹥čĆčī ą╗ąĄčéąĮąŠą│ąŠ čüąŠčüčéą░ą▓ą░ ąĖ čĆąĄčłą░čéčī ąĘą░ą┤ą░čćąĖ ą┐čĆąĖ ą╝ąĄąĮčīčłąĖčģ 菹║ąŠąĮąŠą╝ąĖč湥čüą║ąĖčģ ąĘą░čéčĆą░čéą░čģ. ąÜ č鹊ą╝čā ąČąĄ ąŠčéčüčāčéčüčéą▓ąĖąĄ č湥ą╗ąŠą▓ąĄą║ą░ ąĮą░ ą▒ąŠčĆčéčā ąæą¤ąøąÉ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░čéčī ą┐čĆąŠčåąĄčüčü ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĮą░ ą▓čüąĄčģ čŹčéą░ą┐ą░čģ, čüąĮčÅčéčī ą╝ąĮąŠą│ąĖąĄ ą║ąŠąĮčüčéčĆčāą║čéąĖą▓ąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ, čāą▓ąĄą╗ąĖčćąĖčéčī 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčāčÄ ąĮą░ą┤ąĄąČąĮąŠčüčéčī, čüąĮąĖąĘąĖčéčī ą▓ąĘą╗ąĄčéąĮčāčÄ ą╝ą░čüčüčā.
ąöą░ą╗ąĄąĄ čĆą░čüą╝ąŠčéčĆąĖą╝ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝čŗą╣ ą╝ąĄč鹊ą┤ ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą░ą║čéąĖą▓ąĮčŗčģ čäą░ąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą░ąĮč鹥ąĮąĮčŗčģ čĆąĄčłąĄč鹊ą║.
ą×ą▒čŖąĄą║čéą░ą╝ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ čÅą▓ą╗čÅčÄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čÄčēą░čÅ ąĖ ą┐čĆąĖąĄą╝ąĮą░čÅ ąÉążąÉąĀ čü čĆą░ąĘą╝ąĄčĆą░ą╝ąĖ ą░ą┐ąĄčĆčéčāčĆčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ 100čģ20 ąĖ 100čģ50 ą╝ (ą┤ą╗ąĖąĮą░ čģ ą▓čŗčüąŠčéą░).
ąĀą░ąĘą╝ąĄčĆčŗ ą░ą┐ąĄčĆčéčāčĆ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čüą┤ąĄą╗ą░čéčī ą▓čŗą▓ąŠą┤ ąŠ č乊čĆą╝ąĄ ąĖčüčüą╗ąĄą┤čāąĄą╝ąŠą╣ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ: ą▓ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╝ čüąĄč湥ąĮąĖąĖ čāąĘą║ą░čÅ ąöąØ, ą▓ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ ŌĆō čłąĖčĆąŠą║ą░čÅ ąöąØ, č鹊 ąĄčüčéčī ąöąØ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī "ą▓ąĄąĄčĆąĮčāčÄ" (ą╝ąĮąŠą│ąŠą╗čāč湥ą▓čāčÄ) č乊čĆą╝čā.
ąŻčćąĖčéčŗą▓ą░čÅ ąĮą░ąĖą▒ąŠą╗čīčłąĖą╣ čĆą░ąĘą╝ąĄčĆ ą░ą┐ąĄčĆčéčāčĆčŗ ąĀąøąĪ, čĆą░čüčüč鹊čÅąĮąĖąĄ ą┤ą░ą╗čīąĮąĄą╣ ąĘąŠąĮčŗ ą▒čāą┤ąĄčé čüčāčēąĄčüčéą▓ąĄąĮąĮčŗą╝. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čüąŠą║čĆą░čēąĄąĮąĖčÅ čŹą║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčŗčģ ąĘą░čéčĆą░čé ąĖ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąŠąĮąĮčŗčģ čüą╗ąŠąČąĮąŠčüč鹥ą╣ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĄč鹊ą┤ ą┐ąĄčĆąĄč乊ą║čāčüąĖčĆąŠą▓ą║ąĖ ąÉążąÉąĀ ąĮą░ 3 ą║ą╝.
ąÆ čĆą░ą▒ąŠč鹥 čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ ą▓ąŠą┐čĆąŠčüčŗ ą▓čŗčüąŠą║ąŠč鹊čćąĮąŠą│ąŠ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąĖ, ąŠčłąĖą▒ą║ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĖčüč鹊čćąĮąĖą║ąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐ąŠą│čĆąĄčłąĮąŠčüč鹥ą╣, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą║ąŠą╝ą┐ą╗ąĄą║čüą░, ąĮą░ąĘąĄą╝ąĮą░čÅ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆą░, ą░ čéą░ą║ąČąĄ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąŠąĮąĮąŠ-č鹥čģąĮąĖč湥čüą║ąĖąĄ ą▓ąŠą┐čĆąŠčüčŗ 菹║čüą┐ą╗čāą░čéą░čåąĖąĖ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą║ąŠą╝ą┐ą╗ąĄą║čüą░. ąÆ č鹊ą╝ čćąĖčüą╗ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠą▒ą╗ąĄčéą░, ą▓ąŠą┐čĆąŠčüčŗ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ ąĖ ą┐ąŠčüč鹊ą▒čĆą░ą▒ąŠčéą║ąĖ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣.
ąöą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą┐čĆąĖąĄą╝ąĮąŠą╣ ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ ą░ąĮč鹥ąĮąĮ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąĖ ą▒ąŠčĆč鹊ą▓ąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ. ąśąĘą╝ąĄčĆąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ ą┐ą╗ąŠčéąĮąŠčüčéąĖ ą┐ąŠč鹊ą║ą░ ą╝ąŠčēąĮąŠčüčéąĖ ąĖąĘą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ ąÉążąÉąĀ ą▒čāą┤čāčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčīčüčÅ ą▓ čāąĘą╗ą░čģ ąŠą▒ą╗ąĄčéąĮąŠą╣ čüąĄčéą║ąĖ ąĮą░ ą║ą▓ą░ąĘąĖąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╝ čĆą░čüčüč鹊čÅąĮąĖąĖ ąŠčé ąĖčüč鹊čćąĮąĖą║ą░. ą¤čĆąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ąĮąŠą╣ ąÉążąÉąĀ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠą┤ąŠą▒ąĮą░čÅ ąŠą▒ą╗ąĄčéąĮą░čÅ čüąĄčéą║ą░, ąĮąŠ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą▒čāą┤ąĄčé čÅą▓ą╗čÅčéčīčüčÅ ą▒ąŠčĆč鹊ą▓ąŠą╣ ąĖąĘą╗čāčćą░č鹥ą╗čī. ąÉ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčīčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ čüą░ą╝ąŠą╣ ąÉążąÉąĀ.

ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ, ą┐ąŠą╗čāčćą░ąĄą╝čŗąĄ čü ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓, čĆąĄą│ąĖčüčéčĆąĖčĆčāčÄčéčüčÅ ąĮą░ ą▒ąŠčĆčéčā ąæą¤ąøąÉ čü ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą╝ąĄčéą║ąŠą╣.
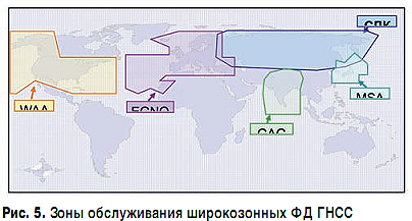
ąŚą░ą┤ą░čćčā ą▓čŗčüąŠą║ąŠč鹊čćąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ą╝čŗ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ čĆąĄčłąĖčéčī čü ą┐ąŠą╝ąŠčēčīčÄ čłąĖčĆąŠą║ąŠąĘąŠąĮąĮąŠą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ąōąøą×ąØąÉąĪąĪ-čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ (ąĪąöąÜą£) ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ (~1575 ą£ąōčå) ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ąŠą▓ GPS ą▓ č乊čĆą╝ą░č鹥 SBAS č湥čĆąĄąĘ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗąĄ čüą┐čāčéąĮąĖą║ąĖ čüąĄčĆąĖąĖ "ąøčāčć-5".
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąŠą▓ąĄą┤ąĄąĮąĮčŗčģ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ą▒čŗą╗ čüą┤ąĄą╗ą░ąĮ ą▓čŗą▓ąŠą┤, čćč鹊 ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī ą▓ čĆąĄąĘčāą╗čīčéą░čéą░čģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ 4 ą┐čĆąĖčćąĖąĮą░ą╝ąĖ:
1. ą×čłąĖą▒ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü č乊ą║čāčüąĖčĆąŠą▓ą║ąŠą╣ ąÉążąÉąĀ.
ąĪą┤ąĄą╗ą░ąĮąĮčŗąĄ čĆą░čüč湥čéčŗ čüą▓ąĖą┤ąĄč鹥ą╗čīčüčéą▓čāčÄčé ąŠ čģąŠčĆąŠčłąĄą╣ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ ą╝ąĄč鹊ą┤ą░ čāąČąĄ ą┐čĆąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅčģ ąĮą░ čĆą░čüčüč鹊čÅąĮąĖčÅčģ ą▒ąŠą╗ąĄąĄ 2ŌĆō3 čĆą░ąĘą╝ąĄčĆąŠą▓ čĆą░čüą║čĆčŗą▓ą░.
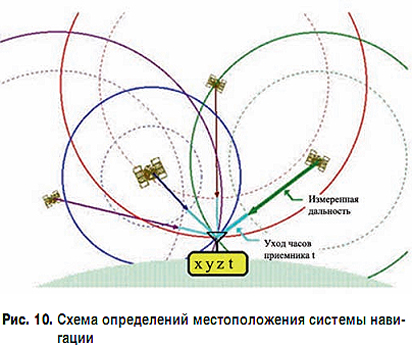
2. ą×čłąĖą▒ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ, čŹč鹊 čāčüą╗ąŠą▓ąĖčÅ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čĆą░ą┤ąĖąŠą▓ąŠą╗ąĮ. ąÆąŠą╗ąĮąĄ, ą┐čĆąŠą▒ąĖą▓ą░čÅčüčī ąĖąĘ ąŠčéą║čĆčŗč鹊ą│ąŠ ą║ąŠčüą╝ąŠčüą░ ąĮą░ ąŚąĄą╝ą╗čÄ, ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐čĆąŠčģąŠą┤ąĖčéčī č湥čĆąĄąĘ čĆą░ąĘąĮčŗąĄ čüą╗ąŠąĖ ą░čéą╝ąŠčüč乥čĆčŗ, ą│ą┤ąĄ ąŠąĮą░ ą┐čĆąĄą╗ąŠą╝ą╗čÅąĄčéčüčÅ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ.
ąÆąŠ-ą▓č鹊čĆčŗčģ, č鹊čćąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé čüą┐čāčéąĮąĖą║ą░ ąĮą░ą┐čĆčÅą╝čāčÄ čüą▓čÅąĘą░ąĮą░ čü č鹊čćąĮąŠčüčéčīčÄ čŹč乥ą╝ąĄčĆąĖą┤. ąŁč乥ą╝ąĄčĆąĖą┤čŗ ą┐čĆąĖą┤čāą╝čŗą▓ą░čÄčé ąĮąĄ čüą░ą╝ąĖ čüą┐čāčéąĮąĖą║ąĖ, ąŠąĮąĖ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ąĮą░ čüą┐čāčéąĮąĖą║ čü ąĮą░ąĘąĄą╝ąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗čīąĮčŗčģ čüčéą░ąĮčåąĖą╣, ą┐čĆąĖą╝ąĄčĆąĮąŠ čĆą░ąĘ ą▓ čüčāčéą║ąĖ. ąÜčĆąŠą╝ąĄ ąĮą░čćą░ą╗čīąĮčŗčģ ą┐ąŠą│čĆąĄčłąĮąŠčüč鹥ą╣, ąŠąĮąĖ ąĄčēąĄ "ą┐ąŠčĆčéčÅčéčüčÅ čü ą▓ąŠąĘčĆą░čüč鹊ą╝". ąĪčÄą┤ą░ ąČąĄ čāčüą╗ąŠą▓ąĮąŠ ą╝ąŠąČąĮąŠ ąŠčéąĮąĄčüčéąĖ čāčģąŠą┤ ą▒ąŠčĆč鹊ą▓čŗčģ čćą░čüąŠą▓ čüą┐čāčéąĮąĖą║ą░.
ąØą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąŠą▓ąĄą┤ąĄąĮąĮčŗčģ čĆą░čüč湥č鹊ą▓ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ č鹊čćąĮąŠčüč鹥ą╣ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮąŠ-čüą║ąŠčĆąŠčüčéąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ąæą¤ąøąÉ ąĮąĄ čģčāąČąĄ ~ 1ŌĆō1,5 ą╝ ą┐ąŠ ą▓ąĄą║č鹊čĆčā ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖ ąĮąĄ čģčāąČąĄ ~ 1,5ŌĆō2 čüą╝/čü ą┐ąŠ ą▓ąĄą║č鹊čĆčā čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠą╗ąĄčéą░.
3. ą×čłąĖą▒ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĖąĘą╝ąĄčĆąĄąĮąĖąĄą╝ ą╝ąŠčēąĮąŠčüčéąĖ ąĖąĘą╗čāč湥ąĮąĖčÅ:
4. ą×čłąĖą▒ą║ąĖ, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖąĄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąŠčüč鹊ą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣:
ąĪąŠą▓ąĄčĆčłąĖą▓ ąŠą▒ą╗ąĄčé, ąæą¤ąøąÉ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ č鹊čćą║čā čüčéą░čĆčéą░ ąĖ čüąŠą▓ąĄčĆčłą░ąĄčé ą┐ąŠčüą░ą┤ą║čā ąĮą░ ą┐ą░čĆą░čłčÄč鹥. ąŚą░č鹥ą╝ ą┤ą░ąĮąĮčŗąĄ čü ą▒ąŠčĆč鹊ą▓ąŠą│ąŠ ąĮą░ą║ąŠą┐ąĖč鹥ą╗čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ą╝ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗą╝ čāąĘą╗ąŠą╝, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗą╝ ą▓ ąĮą░ąĘąĄą╝ąĮąŠą╝ ą┐čāąĮą║č鹥 čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąØą¤ąŻ).
ąØą¤ąŻ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮąŠąĄ čéčĆą░ąĮčüą┐ąŠčĆčéąĮąŠąĄ čüčĆąĄą┤čüčéą▓ąŠ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąæą¤ąøąÉ, ą║ąŠąĮčéčĆąŠą╗čÅ ą┐ąŠą╗ąĄčéą░, čéčĆą░ąĮčüą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĄą│ąŠ ąĄą│ąŠ ą┐ąĄčĆčüąŠąĮą░ą╗ą░, ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▒ąĄčüą┐ąĄčĆąĄą▒ąŠą╣ąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ą║ą░ą║ ą▓ ą┤ą▓ąĖąČąĄąĮąĖąĖ, čéą░ą║ ąĖ ąĮą░ čüč鹊čÅąĮą║ąĄ.
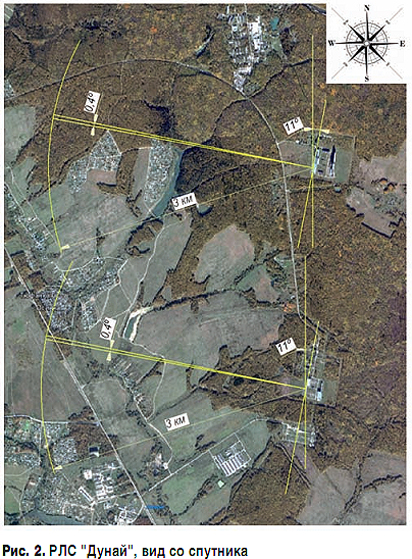
ążčāčĆą│ąŠąĮ ąĖą╝ąĄąĄčé 2 ąĘąŠąĮčŗ: čüą░ą╗ąŠąĮ (ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąŠčéčüąĄą║) ąĖ ąŠčéčüąĄą║ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą╝ą░čćč鹊ą▓ąŠą│ąŠ ąĖ ą░ąĮč鹥ąĮąĮąŠ-čäąĖą┤ąĄčĆąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ (ą░ąĮč鹥ąĮąĮčŗą╣ ąŠčéčüąĄą║). ąØą░ ą║čĆčŗčłąĄ čäčāčĆą│ąŠąĮą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą░ąĮč鹥ąĮąĮąŠ-čäąĖą┤ąĄčĆąĮą░čÅ čüąĖčüč鹥ą╝ą░, ą║ąŠč鹊čĆą░čÅ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ čüčŖąĄą╝ąĮčŗą╝ čĆą░ą┤ąĖąŠą┐čĆąŠąĘčĆą░čćąĮčŗą╝ ą║čāą┐ąŠą╗ąŠą╝.
ąÆ čĆą░ą▒ąŠč湥ą╝ ąŠčéčüąĄą║ąĄ (čüą░ą╗ąŠąĮąĄ) čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮčŗ ą╝ąĄčüčéą░ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓, ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ, ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗčģ ąĖ ąĖąĮčŗčģ čüąĖčüč鹥ą╝, čüąĖčüč鹥ą╝ą░ 菹╗ąĄą║čéčĆąŠą┐ąĖčéą░ąĮąĖčÅ, čüąĖčüč鹥ą╝ą░ ąČąĖąĘąĮąĄąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ. ąÆ ą░ąĮč鹥ąĮąĮąŠą╝ ąŠčéčüąĄą║ąĄ, ą║čĆąŠą╝ąĄ ą╝ąĄčüčé ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą╝ą░čćč鹊ą▓ąŠą│ąŠ ąĖ ą░ąĮč鹥ąĮąĮąŠ-čäąĖą┤ąĄčĆąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ, ąĖą╝ąĄčÄčéčüčÅ ą╝ąĄčüčéą░ ą┤ą╗čÅ ąŠčéą┤čŗčģą░ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓.
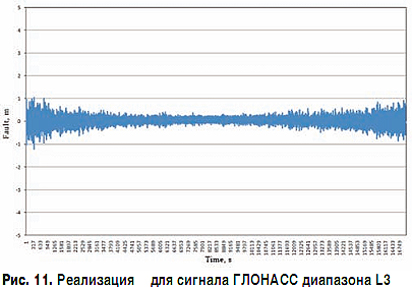
ąĀąĄąĘčāą╗čīčéą░č鹊ą╝ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāą┤čāčé čÅą▓ą╗čÅčéčīčüčÅ č乊čĆą╝ą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ čäą░ą║čéąĖč湥čüą║ąĖąĄ ąöąØ (ąŠą▒čŖąĄą╝ąĮą░čÅ ąöąØ, čĆą░ąĘą╗ąĖčćąĮčŗąĄ čüąĄč湥ąĮąĖčÅ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ąŠą┐ąĄčĆą░č鹊čĆą░, ą║ą░čĆč鹊ą│čĆą░čäąĖč湥čüą║ąĖąĄ ą┐čĆąŠąĄą║čåąĖąĖ, ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąÉążąÉąĀ, čĆą░čüčüčćąĖčéą░ąĮąĮčŗąĄ ą┐ąŠ ąöąØ (ąŁąśąśą£, čłčāą╝ąŠą▓ą░čÅ ą┤ąŠą▒čĆąŠčéąĮąŠčüčéčī)). ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą╝čŗ čü čéčĆąĄą▒čāąĄą╝ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ čüą╝ąŠąČąĄą╝ čüą║ą░ąĘą░čéčī, ą║ą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čäą░ą║čéąĖč湥čüą║ą░čÅ ąöąØ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čĆą░čüč湥čéąĮąŠą╣.
ąöą╗čÅ ą▓ąĖąĘčāą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüąŠą▒ąŠą╣ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮąĄą║ąĖą╣ ą╝ą░čüčüąĖą▓ č鹊č湥ą║ ą▓ čéčĆąĄčģą╝ąĄčĆąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, ąĮčāąČąĮąŠ ą┐ąŠčüčéčĆąŠąĖčéčī ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčī, čüąŠčüč鹊čÅčēčāčÄ ąĖąĘ ą┐ąŠą╗ąĖą│ąŠąĮąŠą▓, ą▓ ą┐čĆąŠčüč鹥ą╣čłąĄą╝ čüą╗čāčćą░ąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĖčģ čüąŠą▒ąŠą╣ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ąĖ.

ąśčüą┐ąŠą╗čīąĘčāąĄą╝ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖąĖ ąĖąĘčĆą░ąĖą╗čīčüą║ąĖčģ čāč湥ąĮčŗčģ ą¤ąŠčĆą░ąĮąĮą░ ąĖ ąōąŠčéčüą╝ą░ąĮą░ "ąÆąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ čéčĆąĄčģą╝ąĄčĆąĮąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą▒ąŠą▒čēąĄąĮąĮąŠą╣ čäčāąĮą║čåąĖąĖ čĆą░čüčüč鹊čÅąĮąĖčÅ" [2].
ąĀą░ą┤ąĖą░ą╗čīąĮą░čÅ ą▒ą░ąĘąĖčüąĮą░čÅ čäčāąĮą║čåąĖčÅ (RBF) - čäčāąĮą║čåąĖčÅ, ą┐čĆąĖąĮąĖą╝ą░čÄčēą░čÅ ą▓ąĄčēąĄčüčéą▓ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖ ąĘą░ą▓ąĖčüčÅčēą░čÅ ąŠčé ą┤ąĖčüčéą░ąĮčåąĖąĖ ąŠčé ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ č鹊čćą║ąĖ c, ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą╣ čåąĄąĮčéčĆąŠą╝, (x, c) = (||x - c||), ą│ą┤ąĄ x, c - ą▓ąĄą║č鹊čĆčŗ, || || - ąĢą▓ą║ą╗ąĖą┤ąŠą▓ąŠ čĆą░čüčüč鹊čÅąĮąĖąĄ. ą¤čĆąŠčüč鹥ą╣čłąĖą╝ ą┐čĆąĖą╝ąĄčĆąŠą╝ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĖą│ą░čĆą╝ąŠąĮąĖč湥čüą║ąĖą╣ čüą┐ą╗ą░ą╣ąĮ čüč鹥ą┐ąĄąĮąĖ 1: (r) = r, ą│ą┤ąĄ r - ąĢą▓ą║ą╗ąĖą┤ąŠą▓ąŠ čĆą░čüčüč鹊čÅąĮąĖąĄ.
ąĀą░čüčüą╝ąŠčéčĆąĖą╝ ą▓ąĄą║č鹊čĆ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▓ąĖą┤ą░:

ą│ą┤ąĄ . N

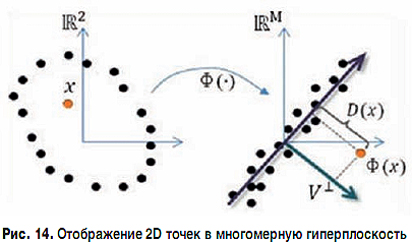
ąŁč鹊čé ą▓ąĄą║č鹊čĆ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝ ą▓ąĄą║č鹊čĆą░ x ąĖąĘ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┤ą▓čāčģ ąĖą╗ąĖ čéčĆąĄčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▓ M-ą╝ąĄčĆąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ. M - čŹč鹊 čćąĖčüą╗ąŠ čåąĄąĮčéčĆąŠą▓, ą▓čŗą▒čĆą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░ č鹊č湥ą║. ąÉą╗ą│ąŠčĆąĖčéą╝ ą▓čŗą▒ąŠčĆą░ ąĮąĄ ąŠą┐ąĖčüą░ąĮ ą▓ čĆą░ą▒ąŠč鹥 [2], ąĮąŠ čüčāčēąĄčüčéą▓čāąĄčé ą┐čāą▒ą╗ąĖą║ą░čåąĖčÅ ąÜąŠąĮąŠąĮčŗčģąĖąĮą░ [3] ą┤ą╗čÅ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ ąĮą░ąĖą╝ąĄąĮąĄąĄ ą▓ą░ąČąĮčŗčģ čåąĄąĮčéčĆąŠą▓. ąĢčüą╗ąĖ ą▓čģąŠą┤ąĮčŗčģ č鹊č湥ą║ ąĮąĄą╝ąĮąŠą│ąŠ (ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠč鹥ąĮ), ą╝ąŠąČąĮąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ čåąĄąĮčéčĆąŠą▓ ą▓čŗą▒čĆą░čéčī ą▓čüąĄ ą▓čģąŠą┤ąĮčŗąĄ č鹊čćą║ąĖ. ąĢčüą╗ąĖ č鹊č湥ą║ ą╝ąĮąŠą│ąŠ (čéčŗčüčÅčćąĖ, ą┤ąĄčüčÅčéą║ąĖ ąĖ čüąŠčéąĮąĖ čéčŗčüčÅčć), ą▓ąŠąĘąĮąĖą║ąĮčāčé čüą╗ąŠąČąĮąŠčüčéąĖ ą┐čĆąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĖ ą╝ą░čéčĆąĖčå čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą┐ąŠčŹč鹊ą╝čā čćąĖčüą╗ąŠ čåąĄąĮčéčĆąŠą▓ ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąĮčāąČąĮąŠ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čéčī.
ąĪąŠčüčéą░ą▓ąĖą╝ ą╝ą░čéčĆąĖčåčā čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▓ąĖą┤ą░:

ą│ą┤ąĄ i - ąĮąŠą╝ąĄčĆ čüčéčĆąŠą║ąĖ, j - ąĮąŠą╝ąĄčĆ čüč鹊ą╗ą▒čåą░.
ąÆ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠą╣ čüčéą░čéąĖčüčéąĖą║ąĄ ąĖ č鹥ąŠčĆąĖąĖ ą▓ąĄčĆąŠčÅčéąĮąŠčüč鹥ą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą╝ą░čéčĆąĖčåą░ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ. ąÆ ą┤ą░ąĮąĮąŠą╝ ą╝ąĄč鹊ą┤ąĄ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ čüčéčĆąŠąĖčéčüčÅ ą╝ą░čéčĆąĖčåą░ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ ą┤ą╗čÅ ą▓ąĄą║č鹊čĆą░ (x) čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ąĄą│ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą▒čŗą╗ąĖ čüą╗čāčćą░ą╣ąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ. ąĀą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓ąĄą║č鹊čĆąŠą▓ x ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ąĮąĄą║ąŠč鹊čĆčŗą╣ ąĮąĄčāą┐ąŠčĆčÅą┤ąŠč湥ąĮąĮčŗą╣ ą╝ą░čüčüąĖą▓.
ą£ą░čéčĆąĖčåą░ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ ą▓čŗą│ą╗čÅą┤ąĖčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:

ą£ą░čéčĆąĖčåą░ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░ [4]. ąĀą░čüčüč鹊čÅąĮąĖąĄ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░ ą╝ąĄąČą┤čā ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ą▓ąĄą║č鹊čĆąŠą╝ (x) ąĖ ą╝ą░čüčüąĖą▓ąŠą╝ ą▓ąĄą║č鹊čĆąŠą▓ (x), ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗčģ ą┤ą╗čÅ ą▓čģąŠą┤ąĮčŗčģ č鹊č湥ą║, ąŠą▒ąŠą▒čēą░ąĄčé ą┐ąŠąĮčÅčéąĖąĄ ąĢą▓ą║ą╗ąĖą┤ąŠą▓ą░ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ąĖ čāčćąĖčéčŗą▓ą░ąĄčé č乊čĆą╝čā 菹╗ą╗ąĖą┐čüąŠąĖą┤ą░ ą╝ą░čéčĆąĖčåčŗ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ.
ą¤čāč鹥ą╝ čüąĖąĮą│čāą╗čÅčĆąĮąŠą│ąŠ čĆą░ąĘą╗ąŠąČąĄąĮąĖčÅ ą╝ą░čéčĆąĖčåčŗ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ ą┐ąŠą╗čāčćą░ąĄą╝ čüą╗ąĄą┤čāčÄčēčāčÄ č乊čĆą╝čāą╗čā ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░:

ąŚą┤ąĄčüčī k - čüč鹊ą╗ą▒čåčŗ ą╝ą░čéčĆąĖčåčŗ U (čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ą▓ąĄą║č鹊čĆčŗ ą╝ą░čéčĆąĖčåčŗ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ), k - čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą╝ą░čéčĆąĖčåčŗ ą║ąŠą▓ą░čĆąĖą░čåąĖąĖ.
ą¤ąŠčĆą░ąĮąĮ ą┐ąŠą║ą░ąĘą░ą╗, čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮą░ąĖą╝ąĄąĮčīčłąĖčģ čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ ą┐ą░čĆ ą╝ą░čéčĆąĖčåčŗ - 1, ą░ ąĮąĄ ą▓čüąĄ:

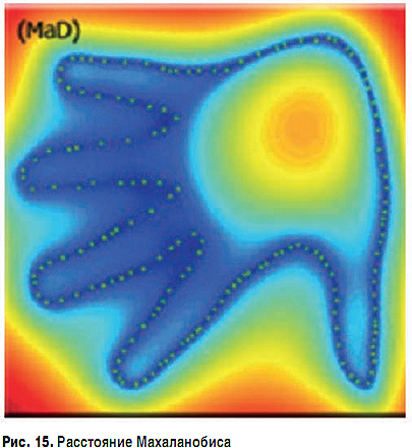
ąĀą░čüčüč鹊čÅąĮąĖąĄ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░ ą┤ą╗čÅ č鹊č湥ą║, ą╗ąĄąČą░čēąĖčģ ą▓ą▒ą╗ąĖąĘąĖ ąŠčé ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄą╝ąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ, ą▒čāą┤ąĄčé ąĮą░ąĖą╝ąĄąĮčīčłąĖą╝. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░.
ąØą░ čĆąĖčü. 15 ą║čĆą░čüąĮčŗą╝ čåą▓ąĄč鹊ą╝ ąŠą▒ąŠąĘąĮą░č湥ąĮčŗ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░, ą░ č鹥ą╝ąĮąŠ-čüąĖąĮąĖą╝ - ąĮą░ąĖą▒ąŠą╗čīčłąĖąĄ. ąÆąĖą┤ąĮąŠ, čćč鹊 ą▓ ąŠą▒ą╗ą░čüčéąĖ, ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą╣ ą║ąŠąĮčéčāčĆąŠą╝ čĆčāą║ąĖ, ąĄčüčéčī ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą╝ąĖąĮąĖą╝čāą╝. ąś ąĘą░ ąŠą▒ą╗ą░čüčéčīčÄ ą║ąŠąĮčéčāčĆą░ č鹊ąČąĄ čüčāčēąĄčüčéą▓čāčÄčé ą┤čĆčāą│ąĖąĄ ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą╝ąĖąĮąĖą╝čāą╝čŗ.
ą¤ą░čĆąĄąĮąĮ ą▓ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠč鹥 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ ą▓ąŠą┤ąŠčĆą░ąĘą┤ąĄą╗ą░, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčéčüčÅ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą╝ąĖąĮąĖą╝čāą╝čŗ ą║ą░ą║ ą│ą╗čāą▒ąŠą║ąĖąĄ čāčćą░čüčéą║ąĖ ą▒ą░čüčüąĄą╣ąĮąŠą▓. ą¤čĆąĖ ąĖčģ ą┐ąŠčüč鹥ą┐ąĄąĮąĮąŠą╝ ąĮą░ą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓ąŠą┤ą░ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą▒ą░čüčüąĄą╣ąĮą░ ą┐ąĄčĆąĄą╗čīąĄčéčüčÅ ą▓ ą┤čĆčāą│ąŠą╣ [2].
ąöą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ąĖčüą║ąŠą╝ąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ čĆą░ąĘąŠą▒čīąĄą╝ ą┐ą░čĆą░ą╗ą╗ąĄą╗ąĄą┐ąĖą┐ąĄą┤, ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčēąĖą╣ ą▓čģąŠą┤ąĮąŠą╣ ą╝ą░čüčüąĖą▓ č鹊č湥ą║, ąĮą░ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą║čāą▒čŗ ąĖ ą▓ čåąĄąĮčéčĆąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗčćąĖčüą╗ąĖą╝ čĆą░čüčüč鹊čÅąĮąĖąĄ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░ ąĖ čāą╝ąĮąŠąČąĖą╝ ąĄą│ąŠ ąĮą░ - 1.
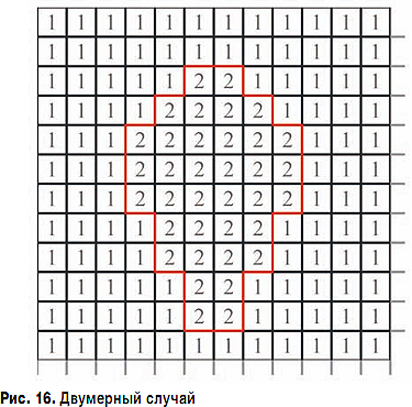
ąÜą░ąČą┤čŗą╣ ąĖąĘ ą║čāą▒ąŠą▓ ą▒čāą┤ąĄčé čüčéčÅą│ąĖą▓ą░čéčīčüčÅ ą║ ą║ą░ą║ąŠą╝čā-č鹊 ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ą╝ąĖąĮąĖą╝čāą╝čā ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░. ąØą░ čĆąĖčü. 16 ą┐ąŠą║ą░ąĘą░ąĮ ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ čüą╗čāčćą░ą╣. ą×ą│čĆą░ąĮąĖčćąĖą▓ą░čÄčēąĖą╣ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ čĆą░ąĘą▒ąĖčé ąĮą░ ą║ą▓ą░ą┤čĆą░čéčŗ. ąÜą░ąČą┤čŗą╣ ą║ą▓ą░ą┤čĆą░čé čüą▓ąŠąĖą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čĆą░čüčüč鹊čÅąĮąĖčÅ ą£ą░čģą░ą╗ą░ąĮąŠą▒ąĖčüą░ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą║ąŠą╝čā-č鹊 ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ą╝ąĖąĮąĖą╝čāą╝čā. ąÜą░ąČą┤čŗą╣ ą║ą▓ą░ą┤čĆą░čé ąĖą╝ąĄąĄčé 4 čüą╝ąĄąČąĮčŗčģ ą║ą▓ą░ą┤čĆą░čéą░, čü ą║ą░ąČą┤čŗą╝ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąŠąĮ čĆą░ąĘą┤ąĄą╗čÅąĄčé ąŠą▒čēąĄąĄ čĆąĄą▒čĆąŠ. ąóąĄ čĆąĄą▒čĆą░, ą║ąŠč鹊čĆčŗąĄ čĆą░ąĘą┤ąĄą╗čÅčÄčé ą║ą▓ą░ą┤čĆą░čéčŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čĆą░ąĘąĮčŗą╝ ą╝ąĖąĮąĖą╝čāą╝ą░ą╝, ąŠą▒čĆą░ąĘčāčÄčé ąĖčüą║ąŠą╝čāčÄ ą╗ąŠą╝ą░ąĮčāčÄ, ą░ą┐ą┐čĆąŠą║čüąĖą╝ąĖčĆčāčÄčēčāčÄ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄą╝čāčÄ ą║čĆąĖą▓čāčÄ, ąŠą│ąĖą▒ą░čÄčēčāčÄ ą╝ą░čüčüąĖą▓ ą▓čģąŠą┤ąĮčŗčģ č鹊č湥ą║. ąöą╗čÅ čéčĆąĄčģą╝ąĄčĆąĮąŠą│ąŠ čüą╗čāčćą░čÅ čĆą░čüčüčāąČą┤ąĄąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗ.
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąĖ ą╝ąĄč鹊ą┤ąĖą║ąĖ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ, čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓čŗ ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┤ą░čć ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą║čĆčāą┐ąĮąŠą░ą┐ąĄčĆčéčāčĆąĮčŗčģ čüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ ą░ąĮč鹥ąĮąĮ, ąĮąŠ ąĖ ą┤ą╗čÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ ą░ąĮą░ą╗ąĖąĘą░ 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ ą┐ąŠą╗čÅ, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ą┤ą╗čÅ ą░ąĮą░ą╗ąĖąĘą░ čüąĄč鹥ą╣ čüąŠč鹊ą▓ąŠą╣ čüą▓čÅąĘąĖ 2G/3G/4G.
ąøąĖč鹥čĆą░čéčāčĆą░
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ą¢čāčĆąĮą░ą╗ "ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ" #1, 2014
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 7968
ąĪčéą░čéčīąĖ ą┐ąŠ č鹥ą╝ąĄ
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣


