
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░č鹊čĆčüą║ąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣

ąÜąĖčĆąĖą╗ą╗ ąŚąŠč鹊ą▓, ą┤ąĖčĆąĄą║č鹊čĆ ą×ą×ą× "ą×ą┐č鹊ąÜą×ą£"
ą£ąŠą▒ąĖą╗čīąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čüąŠč鹊ą▓ąŠą╣ čüą▓čÅąĘąĖ ąĮą░ čüąĄą│ąŠą┤ąĮčÅčłąĮąĖą╣ ą┤ąĄąĮčī čÅą▓ą╗čÅčÄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖąĘ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▒čāčĆąĮąŠ čĆą░ąĘą▓ąĖą▓ą░čÄčēąĖčģčüčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖą╣ č鹥ą╗ąĄą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čāčüą╗čāą│. ąÆ ą┐ąĄčĆąĄč湥ąĮčī čłčéą░čéąĮčŗčģ čāčüą╗čāą│ čüąŠč鹊ą▓ąŠą╣ čüą▓čÅąĘąĖ čāąČąĄ ą┤ą░ą▓ąĮąŠ ą▓ąŠčłą╗ąĖ čéčĆą░ąĮčüą╗čÅčåąĖčÅ čĆą░ą┤ąĖąŠ, MMS, GPRS, WAP ąĖ ą╝ąĮąŠą│ąĖąĄ ą┤čĆčāą│ąĖąĄ čäčāąĮą║čåąĖąĖ, ąĮąĄ ąĖą╝ąĄčÄčēąĖąĄ ą┐čĆčÅą╝ąŠą│ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÅ ą║ ą┐ąĄčĆąĄą┤ą░č湥 ą│ąŠą╗ąŠčüąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ. ąĪčĆąĄą┤ąĖ ą┐čĆąŠčćąĖčģ čÅčĆą║ąŠ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ čāčüą╗čāą│ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ čüčéą░ąĮčåąĖąĖ. ąöą░ąĮąĮą░čÅ čāčüą╗čāą│ą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąŠą▓ą░ ąĖ ąĄčēąĄ ąĮąĄ ą┤ąŠ ą║ąŠąĮčåą░ ą░ą┐čĆąŠą▒ąĖčĆąŠą▓ą░ąĮą░ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ąĖ.
ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▒čāčĆąĮčŗą╣ čĆąŠčüčé ą▓čŗą┐čāčüą║ą░ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ čüčéą░ąĮčåąĖą╣ ą▓ čĆą░ą╝ą║ą░čģ čüąŠč鹊ą▓čŗčģ čüąĖčüč鹥ą╝ čüą▓čÅąĘąĖ. ąØąŠą▓čŗąĄ ą╝ą░čĆą║ąĖ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ čüčéą░ąĮčåąĖą╣ ą▒ąĖąĘąĮąĄčü-ą║ą╗ą░čüčüą░ čāąČąĄ čüąŠą┤ąĄčƹȹ░čé ąĮąĄ č鹊ą╗čīą║ąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ąĮą░ą▓ąĖą│ą░č鹊čĆčŗ, ąĮąŠ ąĖ ą║ą░čĆčéčŗ ą╝ąĄčüčéąĮąŠčüč鹥ą╣, ąĮą░ ą║ąŠč鹊čĆčŗčģ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą▒ąĖą╗čīąĮčŗą╣ č鹥ą╗ąĄč乊ąĮ ą▒čāą┤ąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ. ąæąĄąĘčāčüą╗ąŠą▓ąĮąŠ, ą▓ čĆą░ą╝ą║ą░čģ čéą░ą║ąŠą│ąŠ čĆąŠčüčéą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠą║ąŠąĮąĄčćąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ąĖ ą┐ąŠą┐čŗčéą║ąĖ čāą╗čāčćčłąĄąĮąĖčÅ ą║ą░č湥čüčéą▓ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ (ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ).
ą×ą┤ąĮąĖą╝ąĖ ąĖąĘ ąŠčüąĮąŠą▓ąĮčŗčģ čüą┐ąŠčüąŠą▒ąŠą▓ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čüąŠč鹊ą▓čŗčģ čüąĖčüč鹥ą╝ą░čģ čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĮčāčéčĆąĖčüąĖčüč鹥ą╝ąĮčŗąĄ čüą┐ąŠčüąŠą▒čŗ (ą╝ąĄč鹊ą┤ čéčĆąĖą░ąĮą│čāą╗čÅčåąĖą╣, ą╝ąĄč鹊ą┤ ą┐ąŠąĖčüą║ą░ ą┐ąŠ čāą│ą╗čā ą┐čĆąĖčģąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą░ąĮč鹥ąĮąĮčā ą▒ą░ąĘąŠą▓ąŠą╣ čüčéą░ąĮčåąĖąĖ ąĖ čé.ą┤.), ą░ čéą░ą║ąČąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ čüąĖčüč鹥ą╝ ąĖčüą║čāčüčüčéą▓ąĄąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ ąŚąĄą╝ą╗ąĖ (ąśąĪąŚ). ąĪčāčēąĄčüčéą▓čāčÄčé ą┤ą▓ąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąśąĪąŚ ŌĆō čŹč鹊 ą░ą╝ąĄčĆąĖą║ą░ąĮčüą║ą░čÅ čüąĖčüč鹥ą╝ą░ GPS ąĖ čĆąŠčüčüąĖą╣čüą║ąĖą╣ ąōąøą×ąØąÉąĪąĪ. ą×ą▒ąĄ čüąĖčüč鹥ą╝čŗ ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ą▓ąŠąĄąĮąĮčŗąĄ ą╝ąĖąĮąĖčüč鹥čĆčüčéą▓ą░ čüčéčĆą░ąĮ-ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣. ąÆ ąĮąĖčģ ą░ą┐čĆąĖąŠčĆąĖ ą▓ą▓ąĄą┤ąĄąĮčŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ ą┤ą╗čÅ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ čćą░čüčéąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ č鹥čĆčĆąĖč鹊čĆąĖąĖ ą┤čĆčāą│ąĖčģ ą│ąŠčüčāą┤ą░čĆčüčéą▓ ąĖ čüčéčĆą░ąĮ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą│ąŠą▓ąŠčĆąĖčéčī ąŠ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąĮąĄ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ, čģąŠčéčÅ č鹊čćąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ą▓ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠ 30 ą╝ ą▓ S/A-čĆąĄąČąĖą╝ąĄ (ą£ąĖąĮąĖčüč鹥čĆčüčéą▓ąŠ ąŠą▒ąŠčĆąŠąĮčŗ ąĪą©ąÉ ą▓ąĮąŠčüąĖčé ąĖčüą║čāčüčüčéą▓ąĄąĮąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓). ąÆ čüą╗čāčćą░ąĄ ąōąøą×ąØąÉąĪąĪ č鹊čćąĮąŠčüčéčī ą┤ąŠčģąŠą┤ąĖčé ą┤ąŠ 10 ą╝, ąŠą┤ąĮą░ą║ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąśąĪąŚ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąĄąĮčÅąĄčéčüčÅ, čćč鹊 ą▓ą╗ąĖčÅąĄčé ąĮą░ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ.
ąÆčŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą┐čĆąĖčćąĖąĮčŗ ą▓čŗąĮčāąČą┤ą░čÄčé čüąŠąĘą┤ą░ą▓ą░čéčī ąĖ čĆą░ąĘą▓ąĖą▓ą░čéčī ąĮą░ąĘąĄą╝ąĮčāčÄ čüąĖčüč鹥ą╝čā ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮąĮčāčÄ ą║ čüąĖą╗ąŠą▓čŗą╝ ą▓ąĄą┤ąŠą╝čüčéą▓ą░ą╝ ąĖ ą┤ąŠčĆąŠą│ąŠčüč鹊čÅčēąĄą╝čā ą║ąŠčüą╝ąĖč湥čüą║ąŠą╝čā ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÄ. ąóą░ą║ąĖąĄ čüąĖčüč鹥ą╝čŗ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčüčéčĆąŠąĖčéčī ąĮą░ ą▒ą░ąĘąĄ čüąŠč鹊ą▓čŗčģ čüąĖčüč鹥ą╝ čüą▓čÅąĘąĖ.
ąÆ čüąĖčüč鹥ą╝ą░čģ čüąŠč鹊ą▓ąŠą╣ čüą▓čÅąĘąĖ čüčéą░ąĮą┤ą░čĆčéą░ GSM 900/1800 ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ čüąĄčéąĖ ąĮą░ čüąĄą│ąŠą┤ąĮčÅčłąĮąĖą╣ ą┤ąĄąĮčī ą┤ą░ąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłčāčÄ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī (ą┤ąŠ 1 000 ą╝), čéą░ą║ ą║ą░ą║ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą╝ąĄč鹊ą┤čŗ, ąŠčüąĮąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą║ą╗ą░čüčüąĖč湥čüą║ąĖčģ ąĖ čüčéą░čéąĖčüčéąĖč湥čüą║ąĖčģ ą╝ąŠą┤ąĄą╗čÅčģ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░, ąĮąĄ čāčćąĖčéčŗą▓ą░čÄčé čüą▓ąŠą╣čüčéą▓ ą║ą░ąĮą░ą╗ą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ.
ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ą░, čüąŠčüč鹊čÅčēą░čÅ ąĖąĘ čéčĆąĄčģ ą▒ą░ąĘąŠą▓čŗčģ čüčéą░ąĮčåąĖą╣ (ąæąĪ) ąĖ ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ čüčéą░ąĮčåąĖąĖ (MSreal). ą¤čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ čüąŠč鹊ą▓ąŠą╣ čüąĄčéąĖ ą▒čŗą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮčŗ čāą│ą╗čŗ ą┐čĆąĖčģąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ąæąĪ ąŠčé ą£ąĪ ąĖ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ąŠ ą£ąĪ (ąĖąĘ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖčģąŠą┤ą░ ąŠčéą║ą╗ąĖą║ą░ čüąĖą│ąĮą░ą╗ą░, echo-ą║ąŠą╝ą░ąĮą┤ą░, zero-sms ąĖ čé.ą┤.). ąóčĆąĖą░ąĮą│čāą╗čÅčåąĖčÅ (ąŠčé ą╗ą░čé. triangulum ŌĆō čéčĆąĄčāą│ąŠą╗čīąĮąĖą║) ŌĆō ąŠą┤ąĖąĮ ąĖąĘ ą╝ąĄč鹊ą┤ąŠą▓ čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄčéąĖ ąŠą┐ąŠčĆąĮčŗčģ ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąĖčģ ą┐čāąĮą║č鹊ą▓ ąĖ čüą░ą╝ą░ čüąĄčéčī, ą┐ąŠčüčéčĆąŠąĄąĮąĮą░čÅ ą┐ąŠ čŹč鹊ą╝čā ą╝ąĄč鹊ą┤čā ŌĆō č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ąĖąĘ čĆčÅą┤ąŠą▓ ąĖą╗ąĖ čüąĄč鹥ą╣ ą┐čĆąĖą╝čŗą║ą░čÄčēąĖčģ ą┤čĆčāą│ ą║ ą┤čĆčāą│čā čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ąŠą▓ ąĖ ąĘą░ čüč湥čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖčģ ą▓ąĄčĆčłąĖąĮ ą▓ ąĖąĘą▒čĆą░ąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąÆ ą║ą░ąČą┤ąŠą╝ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ąĄ ąĖąĘą╝ąĄčĆčÅčÄčé ą▓čüąĄ čéčĆąĖ čāą│ą╗ą░, ą░ ąŠą┤ąĮčā ąĖąĘ ąĄą│ąŠ čüč鹊čĆąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą┐čāč鹥ą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ąŠą▓, ąĮą░čćąĖąĮą░čÅ ąŠčé č鹊ą│ąŠ ąĖąĘ ąĮąĖčģ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠą┤ąĮą░ ąĖąĘ čüč鹊čĆąŠąĮ ą┐ąŠą╗čāč湥ąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ą░ąĘąĖčüąĮąŠą╣ čüč鹊čĆąŠąĮąŠą╣.
ąÆ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą░ą┐čĆąĖąŠčĆąĮčŗčģ čüą▓ąĄą┤ąĄąĮąĖą╣ ąŠ čüą▓ąŠą╣čüčéą▓ą░čģ ą║ą░ąĮą░ą╗ą░, ą│ą┤ąĄ čĆą░ąĘą▓ąĄčĆčéčŗą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮą░čÅ čüąŠč鹊ą▓ą░čÅ čüą▓čÅąĘčī (ą│ąĄąŠąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ), ą╝ąŠąČąĮąŠ ą│ąŠą▓ąŠčĆąĖčéčī ąŠ ąĮąĄą║ąŠč鹊čĆąŠą╣ ąĖąĘąĮą░čćą░ą╗čīąĮąŠą╣ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąŠą╝ąĄčģ ą▓ ą║ą░ąĮą░ą╗ąĄ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░. ą¤ąŠą┐čĆąŠą▒čāąĄą╝ ąŠą┐ąĖčüą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓ąĖą┤čŗ čŹčéąĖčģ ą┐ąŠą╝ąĄčģ ą┤ą╗čÅ čĆą░čüčüą╝ąŠčéčĆąĄąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠą│ąŠ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ.
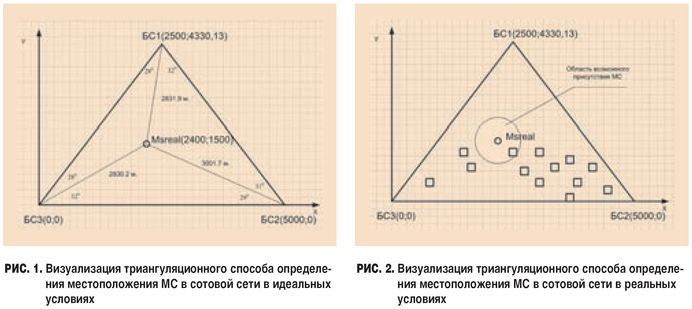
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą╝ąŠą▒ąĖą╗čīąĮą░čÅ čüčéą░ąĮčåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą╝ąĄąČą┤čā ą▒ą░ąĘąŠą▓čŗą╝ąĖ čüčéą░ąĮčåąĖčÅą╝ąĖ (ąæąĪ), čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗą╝ąĖ ą▓ ą▓ąĄčĆčłąĖąĮą░čģ čĆą░ą▓ąĮąŠčüč鹊čĆąŠąĮąĮąĄą│ąŠ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1. ą×ą┤ąĮą░ą║ąŠ ą┤ą░ąĮąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ąĖą╝ąĄąĄčé čĆčÅą┤ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣:
ąØą░ čüąĄą│ąŠą┤ąĮčÅčłąĮąĖą╣ ą┤ąĄąĮčī čüčāčēąĄčüčéą▓čāąĄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą╝ąĄč鹊ą┤ąŠą▓ ąĖ čüą┐ąŠčüąŠą▒ąŠą▓ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ čüąŠč鹊ą▓čŗčģ čüąĄčéčÅčģ. ą¦ą░čüčéčī ąĖąĘ ąĮąĖčģ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╗čīąĮčŗą╝, ą┤čĆčāą│ąĖąĄ ŌĆō ą║ ą╝ąĄč鹊ą┤ąŠą╗ąŠą│ąĖč湥čüą║ąĖą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░ą╝.
ąśąĘ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ą░ ąæąĪ3-ą£ąĪ-ąæąĪ2 ąĖčēąĄą╝ čüč鹊čĆąŠąĮčā ą£ąĪ-ąæąĪ2 ąĖ čé.ą┤.
ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą░ą╗ą│ąĄą▒čĆčŗ Maple 6.0, ąĮą░čģąŠą┤ąĖą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą£ąĪ. ąÆčüąĄ čéčĆąĖ čüąĖčüč鹥ą╝čŗ čāčĆą░ą▓ąĮąĄąĮąĖą╣ ą▓čŗą┤ą░ą╗ąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ čĆąĄčłąĄąĮąĖąĄ ą£ąĪ (2374,82; 1454,99) ąØą░ čĆąĖčü. 2 ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄą░ą╗čīąĮą░čÅ ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗąĄ č鹊čćą║ąĖ. ą¤ąŠą│čĆąĄčłąĮąŠčüčéčī čüąŠčüčéą░ą▓ąĖą╗ą░ ┬▒133,03 ą╝ ą▓ ąĖą┤ąĄą░ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ.
ąóąĄą┐ąĄčĆčī ą┤ąŠą▒ą░ą▓ąĖą╝ ąĮąĄą║ąĖą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb ą┐ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅą╝ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░. ąØą░ čĆąĖčü. 2 ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ąŠąĘą╝ąŠąČąĮą░čÅ čüą╗čāčćą░ą╣ąĮą░čÅ ą║ąŠąĮčåąĄąĮčéčĆą░čåąĖčÅ ą│ąŠčĆąŠą┤čüą║ąĖčģ čüąŠąŠčĆčāąČąĄąĮąĖą╣, ąĖą╝ąĄčÄčēąĖčģ ąĮąĄą║ąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ čüąŠč鹊ą▓ąŠą╣ čüąĄčéąĖ. ą×ą▒ą╗ą░čüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠą│ąŠ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ čüčéą░ąĮčåąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅą╝ ą▓ ąĖą┤ąĄą░ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ (čĆąĖčü. 2).
ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąæąĪ1-ą£ąĪ ą▒ąĄčĆąĄą╝ čĆą░ą▓ąĮčŗą╝ ąĮčāą╗čÄ, ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąæąĪ3-ą£ąĪ ą▒ąĄčĆąĄą╝ čéą░ą║ąĖą╝, čćč鹊 ąĄą│ąŠ ą▓ą╗ąĖčÅąĮąĖąĄ ą┤ą░ąĄčé ąŠčłąĖą▒ą║čā ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ąŠčé ąæąĪ3 ą┤ąŠ ą£ąĪ 50 ą╝, ą░ ąŠčé ąæąĪ2 ą┤ąŠ ą£ąĪ ŌĆō 100 ą╝.
 ąÆą▓ąĄą┤ąĄąĮąĖąĄ čéą░ą║ąŠą╣ ąŠčłąĖą▒ą║ąĖ ą┤ą░ąĄčé čüčĆąĄą┤ąĮčÄčÄ ąŠčłąĖą▒ą║čā ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą£ąĪ 530,32 ą╝ (čĆąĖčü. 3).
ąÆą▓ąĄą┤ąĄąĮąĖąĄ čéą░ą║ąŠą╣ ąŠčłąĖą▒ą║ąĖ ą┤ą░ąĄčé čüčĆąĄą┤ąĮčÄčÄ ąŠčłąĖą▒ą║čā ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą£ąĪ 530,32 ą╝ (čĆąĖčü. 3).
ą×ą┤ąĮą░ą║ąŠ ą▓ą▓ąĄą┤ąĄąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb ą┐čĆąĖą▓ąĄą┤ąĄčé ąĖ ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ ą▓ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ čāą│ą╗ą░ ą┐čĆąĖčģąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą░ąĮč鹥ąĮąĮčā ąæąĪ. ą¤čĆąĖąĮąĖą╝ą░čÅ ą▓ąŠ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ ┬▒10, ą┐ąŠą╗čāčćą░ąĄą╝ čüčĆąĄą┤ąĮčÄčÄ ąŠčłąĖą▒ą║čā ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą£ąĪ 133,58 ą╝. ąĀąĖčü. 3 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé ą┐ąŠą╗čāč湥ąĮąĮčāčÄ ąŠą▒ą╗ą░čüčéčī čü čāč湥č鹊ą╝ čüą▓ąŠą╣čüčéą▓ ą║ą░ąĮą░ą╗ą░.
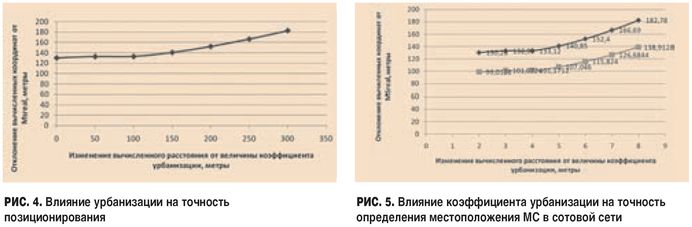
ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb ąĖą╝ąĄąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąĀąĖčü. 4 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą£ąĪ ąŠčé ą▓ąĄą╗ąĖčćąĖąĮčŗ ąŠčłąĖą▒ą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ąŠčé ąæąĪ ą┤ąŠ ą£ąĪ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ čüąŠč鹊ą▓ąŠą╣ čüąĄčéąĖ.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ ą│čāčüč鹊ąĮą░čüąĄą╗ąĄąĮąĮčŗčģ čĆą░ą╣ąŠąĮą░čģ ą│ąŠčĆąŠą┤ą░ ąŠčłąĖą▒ą║ą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┤ąŠčüčéąĖą│ą░ąĄčé čüąŠč鹥ąĮ ą╝ąĄčéčĆąŠą▓.
ą×ą┤ąĮą░ą║ąŠ, ąĄčüą╗ąĖ ą▓ą▓ąĄčüčéąĖ ą▓ čāčĆą░ą▓ąĮąĄąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb, ą░ą┤ąĄą║ą▓ą░čéąĮčŗą╣ ą┐ą╗ąŠčéąĮąŠčüčéąĖ ąĮą░čüąĄą╗ąĄąĮąĖčÅ č鹊ą│ąŠ ąĖą╗ąĖ ąĖąĮąŠą│ąŠ čĆą░ą╣ąŠąĮą░ ą│ąŠčĆąŠą┤ą░, č鹊 ą▓ą╗ąĖčÅąĮąĖąĄ čŹč鹊ą╣ ąŠčłąĖą▒ą║ąĖ ą╝ąŠąČąĮąŠ čāą╝ąĄąĮčīčłąĖčéčī.
ąÆą▓ąŠą┤ąĖą╝ ą▓ ąŠčüąĮąŠą▓ąĮąŠąĄ čāčĆą░ą▓ąĮąĄąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ ąÜurb ą▓ ą▓ąĖą┤ąĄ R, čĆą░ą▓ąĮąŠą│ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╝čā ąŠčéą║ą╗ąŠąĮąĄąĮąĖčÄ ą▒ąĄąĘ čāč湥čéą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ 128,04 ą╝.
ąĀąĄčłąĄąĮąĖąĄą╝ ą▒čāą┤ąĄčé č鹊čćą║ą░ čü ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ (2383,1876; 1368,8954).
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠčłąĖą▒ą║ą░ čüąŠčüčéą░ą▓ąĖą╗ą░ 132,17 ą╝, ą░ ą▒ąĄąĘ čāč湥čéą░ R - 174,18; č鹊čćąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čāą▓ąĄą╗ąĖčćąĖą╗ą░čüčī ąĮą░ 24%. ąĀąĖčü. 5 ąĮą░ą│ą╗čÅą┤ąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čü čāč湥č鹊ą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāčĆą▒ą░ąĮąĖąĘą░čåąĖąĖ.
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ą¢čāčĆąĮą░ą╗ "ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ" #3, 2010
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 8743
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░č鹊čĆčüą║ąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣


