
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ą║ąŠčĆą┐ąŠčĆą░čéąĖą▓ąĮąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣
ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ąĮąĄą┤čĆąĄąĮąĖčÅ ąĮą░ č鹥čĆčĆąĖč鹊čĆąĖą░ą╗čīąĮąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ, ą▓ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą╣ ąĘąŠąĮąĄ ąĖą╗ąĖ ąĮą░ čéčĆą░ąĮčüą┐ąŠčĆčéąĮąŠą╝ čāąĘą╗ąĄ čüąĖčüč鹥ą╝čŗ, čüą┐ąŠčüąŠą▒ąĮąŠą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ (Real Time Location System ŌĆō RTLS), čüčéą░ą▓ąĖčé ą┐ąĄčĆąĄą┤ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮčŗą╝ąĖ ą╗ąĖčåą░ą╝ąĖ ąĘą░ą┤ą░čćčā ą▓čŗą▒ąŠčĆą░ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ, čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠč鹊čĆąŠą╣ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī. ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī čüąĖčüč鹥ą╝čŗ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ ą░ąĮą│ą░čĆą░čģ, č鹊ąĮąĮąĄą╗čÅčģ, čłą░čģčéą░čģ ąĖ čåąĄčģą░čģ ą▒ąĄčüčüą╝čŗčüą╗ąĄąĮąĮąŠ. ąöą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ąĘą░ą║čĆčŗčéčŗčģ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░čģ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖąĄ čüąĖčüč鹥ą╝čŗ čü čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆąŠą╣, ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą║ąŠč鹊čĆąŠą╣ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓. ąÉąĮą░ą╗ąĖąĘčā čéą░ą║ąĖčģ RTLS-č鹥čģąĮąŠą╗ąŠą│ąĖą╣, ą╗ąŠą║ą░ą╗čīąĮčŗčģ čüąĖčüč鹥ą╝, čüčĆą░ą▓ąĮąĄąĮąĖčÄ ąĖčģ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ ąĖ ąĮąĄą┤ąŠčüčéą░čéą║ąŠą▓ ą┐ąŠčüą▓čÅčēąĄąĮ ą┤ą░ąĮąĮčŗą╣ ą╝ą░č鹥čĆąĖą░ą╗.
The necessity to implement system, capable of determining the location of mobile objects (Real Time Location System -RTLS) on the multisite operations, in the industrial zone or transport hub, poses to decision-makers the problem of choosing technology by means of which it is necessary to carry out. Obviously, considering systems, which use satellite navigation signals for monitoring of mobile objects in the hangars, tunnels, mines and workshops, is pointless. For work in confined spaces it is necessary to have local positioning technology using a system with its own infrastructure, which takes place on the elements of the definition of the mobile objects location. This article is devoted to the analysis of such RTLS technologies, local systems, comparison of their merits and demerits.

ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ąĖ ąĘąŠąĮą░ą╗čīąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ ąĖ ąĖčģ (ąŠą▒čŖąĄą║č鹊ą▓) ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ:
ą¤čĆą░ą║čéąĖč湥čüą║ąĖ ą▓čüąĄ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą┐čĆąĄą┤čāčüą╝ą░čéčĆąĖą▓ą░čÄčé ąĮą░ą╗ąĖčćąĖąĄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗčģ ąĘą░ą║ąŠąĮąŠą┤ą░č鹥ą╗čīčüčéą▓ąŠą╝ ą║ą░ą║ čĆą░ą┤ąĖąŠčŹą╗ąĄą║čéčĆąŠąĮąĮčŗąĄ čüčĆąĄą┤čüčéą▓ą░ (ąĀąŁąĪ). ąÆą▓ąŠąĘ, čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĀąŁąĪ ąĮą░ č鹥čĆčĆąĖč鹊čĆąĖąĖ ąĀąŠčüčüąĖą╣čüą║ąŠą╣ ążąĄą┤ąĄčĆą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ čĆčÅą┤ąŠą╝ ąĘą░ą║ąŠąĮąŠą▓ ąĖ ąĮąŠčĆą╝ą░čéąĖą▓ąĮčŗčģ ą░ą║č鹊ą▓, ą║ ą║ąŠč鹊čĆčŗą╝ ąŠčéąĮąŠčüčÅčéčüčÅ:
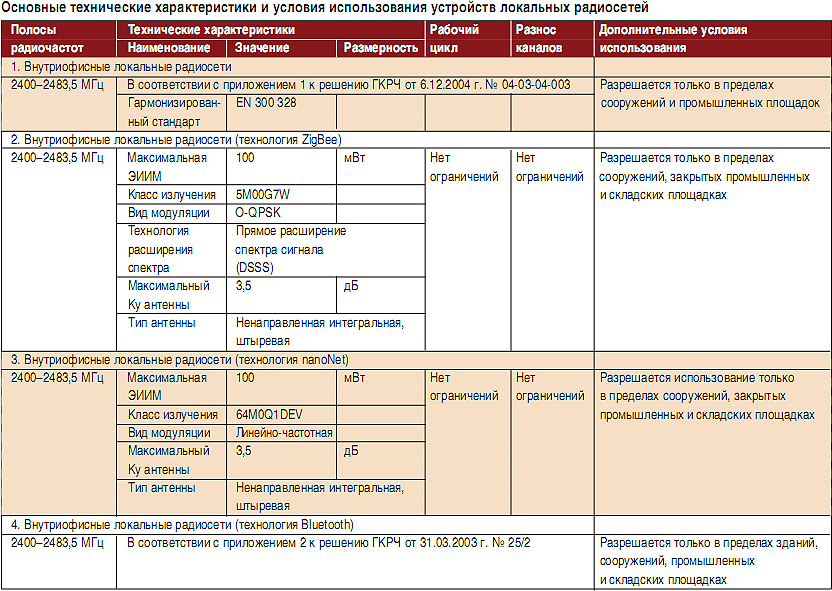
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ č鹥čģąĮąŠą╗ąŠą│ąĖą╣ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ąĖ ąĘąŠąĮą░ą╗čīąĮčŗčģ RTLS čéčĆąĄą▒čāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĀąŁąĪ, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┤ą╗čÅ čĆą░ą┤ąĖąŠčüąĄč鹥ą╣ ą╝ą░ą╗ąŠą│ąŠ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ. ą¤ąĄčĆąĄč湥ąĮčī čüčéą░ąĮą┤ą░čĆč鹊ą▓, č鹥čģąĮąŠą╗ąŠą│ąĖą╣, ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ (čüą╝. čéą░ą▒ą╗ąĖčåčā), ą║ąŠč鹊čĆčŗą╝ ą┤ąŠą╗ąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čéą░ą║ąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čĆąĄčłąĄąĮąĖąĄą╝ ąōąŠčüčāą┤ą░čĆčüčéą▓ąĄąĮąĮąŠą╣ ą║ąŠą╝ąĖčüčüąĖąĖ ą┐ąŠ čĆą░ą┤ąĖąŠčćą░čüč鹊čéą░ą╝ ąŠčé 07.05.2007 Ōä¢ 07-20-03-001 "ą× ą▓čŗą┤ąĄą╗ąĄąĮąĖąĖ ą┐ąŠą╗ąŠčü čĆą░ą┤ąĖąŠčćą░čüč鹊čé čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą╝ą░ą╗ąŠą│ąŠ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ".
ą£ąĮąŠą│ąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ą░ą║ ąŠčéą╝ąĄč湥ąĮąŠ ą▓ [1], ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čüąŠąĘą┤ą░ą▓ą░čéčī RTLS, čüą┐ąŠčüąŠą▒ąĮčŗąĄ čĆąĄčłą░čéčī ąĘą░ą┤ą░čćąĖ ą║ą░ą║ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ, čéą░ą║ ąĖ ąĘąŠąĮą░ą╗čīąĮąŠą│ąŠ (ą┐čĆąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĖ) čāčĆąŠą▓ąĮčÅ.
ąśąĮčäčĆą░čüčéčĆčāą║čéčāčĆą░ čéą░ą║ąĖčģ čüąĖčüč鹥ą╝, ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗ąŠ, čüą┐ąŠčüąŠą▒ąĮą░ ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą╝ą░čüčłčéą░ą▒ąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ (ą┐ąĄčĆčüąŠąĮą░ą╗ą░, č鹥čģąĮąĖą║ąĖ), ąĮąŠ ąĖ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠą▒ą╝ąĄąĮ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮąŠą╣ ąĖ čüą╗čāąČąĄą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą╝ąĄąČą┤čā čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ čüąĖčüč鹥ą╝čŗ ąĖ ą╝ąŠą▒ąĖą╗čīąĮčŗą╝ąĖ ąŠą▒čŖąĄą║čéą░ą╝ąĖ, čÅą▓ą╗čÅčÄčēąĖą╝ąĖčüčÅ ąĄąĄ ą░ą▒ąŠąĮąĄąĮčéą░ą╝ąĖ.
ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čüąĄčéčÅčģ DECT
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ą┐ąŠą┤ą▓ąĖąČąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ čüąĄčéčÅčģ DECT ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╝ (čĆą░ąĘ ą▓ 5ŌĆō10 čü) ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ ą║ą░ąČą┤čŗą╝ ą░ą▒ąŠąĮąĄąĮčéčüą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čāčĆąŠą▓ąĮčÅ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░ (ą╝ąĄč鹊ą┤ RSS ŌĆō Received Signal Strength) ąŠčé ą▓čüąĄčģ ą▒ą░ąĘąŠą▓čŗčģ čüčéą░ąĮčåąĖą╣ (ąæąĪ) čüą▓ąŠąĄą╣ čüąĄčéąĖ, ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą┐ąŠčüąŠą▒ąĮąŠ ąŠą▒ąĮą░čĆčāąČąĖčéčī. ąśąĘą╝ąĄčĆąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā DECT ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąæąĪ ąĖ ą┤ą░ą╗ąĄąĄ ąĮą░ čüąĄčĆą▓ąĄčĆ ą▒ą░ąĘčŗ ą┤ą░ąĮąĮčŗčģ (ąĪąæąö). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ čüąĄčĆą▓ąĄčĆą░, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĄąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐ąŠčüčéčāą┐ąĖą▓čłąĖąĄ ąĮą░ ąĪąæąö ąĘąĮą░č湥ąĮąĖčÅ ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆą░čüčüč鹊čÅąĮąĖąĄ ąŠčé ą░ą▒ąŠąĮąĄąĮčéą░ ą┤ąŠ ą║ą░ąČą┤ąŠą╣ ąĖąĘ ąæąĪ. ąĢčüą╗ąĖ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▓čüąĄčģ ąæąĪ ą▓ DECT-čüąĖčüč鹥ą╝ąĄ ąĖąĘą▓ąĄčüčéąĮąŠ ąĖ ąĮą░ąĮąĄčüąĄąĮąŠ ąĮą░ ą┐ą╗ą░ąĮ, č鹊 ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą░ą▒ąŠąĮąĄąĮčéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čĆąĄčłąĄąĮąĖąĄą╝ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĖą╗ąĖ ąĘą░ą┤ą░čćąĖ ą║ą╗ą░čüč鹥čĆąĖąĘą░čåąĖąĖ ąĖ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖčÅ. ąĀąĄąĘčāą╗čīčéą░čéčŗ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆ čĆą░ą▒ąŠč湥ą│ąŠ ą╝ąĄčüčéą░ ąŠą┐ąĄčĆą░č鹊čĆą░ ąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą▒ą░ąĘąĄ ą┤ą░ąĮąĮčŗčģ.
ąÜą░ąČą┤ą░čÅ ąæąĪ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą▓čÅąĘą░ąĮą░ čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąæąĪ ą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ ą╗ąĖąĮąĖąĄą╣, ą┐ąŠčŹč鹊ą╝čā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ąŠą│čĆą░ąĮąĖč湥ąĮčŗ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ ą┐ąŠ ą┐čĆąŠą║ą╗ą░ą┤ą║ąĄ ą╗ąĖąĮąĖą╣ čüą▓čÅąĘąĖ ąŠčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠ ą▒ą░ąĘąŠą▓čŗčģ čüčéą░ąĮčåąĖą╣.
ą×ą▒ąĄčüą┐ąĄčćąĖą▓ą░čÅ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čĆą░ą┤ąĖąŠčüą▓čÅąĘčī, č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą░ą▒ąŠąĮąĄąĮč鹊ą▓ čü č鹊čćąĮąŠčüčéčīčÄ ą┤ąŠ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ąæąĪ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ą¤ą×), ą░ čéą░ą║ąČąĄ čü č鹊čćąĮąŠčüčéčīčÄ 5ŌĆ”10 ą╝ ąĮą░ ąŠčéą║čĆčŗč鹊ą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąĖą╗ąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą┐ąŠą╝ąĄčēąĄąĮąĖčÅ, ąĮą░čģąŠą┤čÅčēąĄą│ąŠčüčÅ ą▓ ąĘąŠąĮąĄ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüąĖčüč鹥ą╝čŗ čüąŠ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą¤ą×. ąóąŠčćąĮąŠčüčéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčéčüčÅ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čüąŠąŠčĆčāąČąĄąĮąĖčÅčģ, ą╝ą░č鹥čĆąĖą░ą╗čŗ ą║ąŠąĮčüčéčĆčāą║čåąĖą╣ ą║ąŠč鹊čĆčŗčģ ąĖą╝ąĄčÄčé čĆą░ąĘąĮąŠčĆąŠą┤ąĮčāčÄ čüčéčĆčāą║čéčāčĆčā.
ąĪčĆą░ą▓ąĮąĖč鹥ą╗čīąĮąŠ ąĮąĖąĘą║ą░čÅ č鹊čćąĮąŠčüčéčī ąŠą▒čāčüą╗ąŠą▓ą╗ąĄąĮą░:
ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čüąĄčéčÅčģ Wi-Fi (IEEE 802.11a/g/n)
ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čüąĄčéčÅčģ čüčéą░ąĮą┤ą░čĆčéą░ IEEE 802.11a/g/n (Wi-Fi) čłąĖčĆąŠą║ąŠ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮčŗ ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą╣ ąĖ č鹥čģąĮąĖč湥čüą║ąŠą╣ ą╗ąĖč鹥čĆą░čéčāčĆąĄ.
Wi-Fi-č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ąĖą╝ąĄčÄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ RTLS, čüąŠąĘą┤ą░ąĮąĮčŗčģ ąĮą░ ąĖčģ ąŠčüąĮąŠą▓ąĄ. ąŁčéąĖ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąŠą▒čāčüą╗ąŠą▓ą╗ąĄąĮčŗ:
ąÉą▒ąŠąĮąĄąĮčéą░ą╝ąĖ, ąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ Wi-Fi, ą╝ąŠą│čāčé ą▒čŗčéčī: čüą╝ą░čĆčéč乊ąĮčŗ, ąĮąŠčāčéą▒čāą║ąĖ, Wi-Fi-č鹥ą╗ąĄč乊ąĮčŗ, čüčćąĖčéčŗą▓ą░č鹥ą╗ąĖ čłčéčĆąĖčģą║ąŠą┤ąŠą▓, Wi-Fi RFID-č鹥ą│ąĖ ąĖ ą┤čĆčāą│ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąĪčéą░ąĮą┤ą░čĆčé IEEE 802.11a/g/n ą┐čĆąĄą┤čāčüą╝ą░čéčĆąĖą▓ą░ąĄčé CSMA/CA ą║ą░ą║ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ąŠčüčéčāą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ ą║ čüčĆąĄą┤ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą×ą┤ąĮą░ą║ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ Wi-Fi-čāčüčéčĆąŠą╣čüčéą▓ čåąĄąĮčéčĆą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗčģ čüąĖčüč鹥ą╝, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ RTLS, ŌĆō ąĮą░ą┐čĆąĖą╝ąĄčĆ, AeroScout, Aruba, Cisco, H P, Motorola ŌĆō ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąŠą┤ąĄčĆąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čüčĆąĄą┤ąĄ ąĖą╗ąĖ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ąŠą┤ąĮąŠą╣ čüąĄčéąĖ/čüąĖčüč鹥ą╝ąĄ:
ąÜą╗čÄč湥ą▓ąŠą╣ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčīčÄ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĄą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ Wi-Fi RTLS, čÅą▓ą╗čÅčÄčéčüčÅ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗąĄ ą╝ąĄč鹊ą┤čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ [1]. ąÆ čüąĖčüč鹥ą╝ą░čģ ą┐ąĄčĆą▓čŗčģ ą┐ąŠą║ąŠą╗ąĄąĮąĖą╣, ąĖą╝ąĄčÄčēąĖčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą░ą▒ąŠąĮąĄąĮč鹊ą▓ čü č鹊čćąĮąŠčüčéčīčÄ ą┤ąŠ 10 ą╝, čćą░čēąĄ ą▓čüąĄą│ąŠ ą┐čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī ą╝ąĄč鹊ą┤čŗ RSS (Received Signal Strength) ąĖ TDoA (Time Difference of Arrival) ąĖą╗ąĖ ąĖčģ čüąŠč湥čéą░ąĮąĖąĄ. ą¤čĆąĖ RSS čĆą░čüčüč鹊čÅąĮąĖąĄ ą┤ąŠ ąŠą▒čŖąĄą║čéą░ ąŠčåąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ ą╝ąŠčēąĮąŠčüčéąĖ (čāčĆąŠą▓ąĮčÄ) čüąĖą│ąĮą░ą╗ą░. ąÜą░ą║ ąĖ ą▓ čüą╗čāčćą░ąĄ čü DECT, ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čüąŠąŠčĆčāąČąĄąĮąĖčÅčģ ąĖąĘ ą╝ą░č鹥čĆąĖą░ą╗ąŠą▓ čü ąĮąĄąŠą┤ąĮąŠčĆąŠą┤ąĮąŠą╣ čüčéčĆčāą║čéčāčĆąŠą╣ ąĖ ą┐čĆąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ ą┤ą░ą╗čīąĮąŠčüčéąĖ ą╝ąĄč鹊ą┤ RSS ą┤ą░ąĄčé ą▒ąŠą╗čīčłčāčÄ ąŠčłąĖą▒ą║čā ąĘą░ čüč湥čé čüą┐ąĄčåąĖčäąĖą║ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░. ą¤čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą╝ąĄč鹊ą┤ą░ TDoA ą▓ čüąĖą╗čā čüą┐ąĄčåąĖčäąĖą║ąĖ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą║ąČąĄ ąĮąĄ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ą╗ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ č鹊čćąĮąŠčüčéąĖ.
ąĪąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ IEEE 802.11a/g/n (Cisco, Ekahau) ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą░ą▒ąŠąĮąĄąĮč鹊ą▓ ąĮą░čĆčÅą┤čā čü RSS ąĖ TDoA ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĄč鹊ą┤ LPT (Location Patterning Techniques). ą×ąĮ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╝ ą┐ąŠą╗čāč湥ąĮąĖąĖ, ą▓čŗą▒ąŠčĆą║ąĄ ąĖ ąĘą░ą┐ąĖčüąĖ ąĮą░ čüąĄčĆą▓ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĄą╣ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░ ą▓ ą║ąŠąĮą║čĆąĄčéąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ. LPT ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐čĆąĖąĄą╝ą╗ąĄą╝čāčÄ (1ŌĆō5 ą╝) č鹊čćąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą░ą▒ąŠąĮąĄąĮčéą░, ąĮąŠ ą┐čĆąĖ čŹč鹊ą╝ ąĖą╝ąĄąĄčé čĆčÅą┤ ąŠčüąŠą▒ąĄąĮąĮąŠčüč鹥ą╣. ą¤čĆąĖ čĆą░ąĘą▓ąĄčĆčéčŗą▓ą░ąĮąĖąĖ ąĖ ą▓ą▓ąŠą┤ąĄ ą▓ 菹║čüą┐ą╗čāą░čéą░čåąĖčÄ čüąĖčüč鹥ą╝čŗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮčŗąĄ, čéčēą░č鹥ą╗čīąĮčŗąĄ čĆą░ą▒ąŠčéčŗ ą┐ąŠ ąĄąĄ čÄčüčéąĖčĆąŠą▓ą║ąĄ. ąśąĮą░č湥 ą│ąŠą▓ąŠčĆčÅ, ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ 菹║čüą┐ą╗čāą░čéą░čåąĖąĖ čüąĖčüč鹥ą╝čŗ ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüą┐ąĄčåąĖą░ą╗ąĖčüčéčŗ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ "čüąĮčÅčéąĖąĄ" ąĖ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéčĆąĄčéą░ (ąĖą╗ąĖ ą┐ąŠčĆčéčĆąĄč鹊ą▓) ą┐ąŠą╝ąĄčēąĄąĮąĖą╣ ąĖ č鹥čĆčĆąĖč鹊čĆąĖąĖ ąĘąŠąĮčŗ (čüąĄą│ą╝ąĄąĮč鹊ą▓ ąĘąŠąĮčŗ) ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą▓ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮąŠą╝ čüą┐ąĄą║čéčĆąĄ.
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ Wi-Fi RTLS čÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ čüą╗ąŠąČąĮąŠą╣, ą┐ąŠčüčéčĆąŠąĄąĮąĖąĄ ąĖ 菹║čüą┐ą╗čāą░čéą░čåąĖčÅ čéą░ą║ąĖčģ čüąĄč鹥ą╣ čéčĆąĄą▒čāčÄčé ąĮą░ą╗ąĖčćąĖčÅ ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüą┐ąĄčåąĖą░ą╗ąĖčüč鹊ą▓.
ąĪč鹊ąĖą╝ąŠčüčéčī čüąĖčüč鹥ą╝, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ Wi-Fi, čüčāčēąĄčüčéą▓ąĄąĮąĮąŠ ą┐ąŠą▓čŗčłą░ąĄčé č鹊čé čäą░ą║č鹊čĆ, čćč鹊 ą▓ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅčģ ąĖ čāč湥ą▒ąĮčŗčģ ą║čāčĆčüą░čģ ąĖąĘą▓ąĄčüčéąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ Wi-Fi-ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĄ čĆąĄčłąĄąĮąĖą╣ ąĘą░ą┤ą░čć ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ą┤ą▓ąŠąĄ čāą▓ąĄą╗ąĖčćąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ (ą┐ą╗ąŠčéąĮąŠčüčéčī) č鹊č湥ą║ ą┤ąŠčüčéčāą┐ą░ ą▓ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆąĄ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆąŠą╣, ąĮąĄ ąĖą╝ąĄčÄčēąĄą╣ čéą░ą║ąĖčģ ąĘą░ą┤ą░čć. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čüčéčĆąŠąĖč鹥ą╗čīčüčéą▓ąŠ ąĮąŠą▓ąŠą╣ ąĖą╗ąĖ ą╝ąŠą┤ąĄčĆąĮąĖąĘą░čåąĖčÅ ą┐ąŠą┤ ąĘą░ą┤ą░čćąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čāąČąĄ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ąĮą░ ą┐čĆąĄą┤ą┐čĆąĖčÅčéąĖąĖ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüąĄčéąĖ čüčéą░ąĮą┤ą░čĆčéą░ IEEE 802.11a/g/n čéčĆąĄą▒čāčÄčé ą▒ąŠą╗ąĄąĄ čĆą░ąĘą▓ąĖč鹊ą╣ čüčéčĆčāą║čéčāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą║ą░ą▒ąĄą╗čīąĮąŠą╣ čüąĄčéąĖ (ąĪąÜąĪ) ąĖ ą▒ąŠą╗ąĄąĄ čéčēą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čģąŠą┤ą░ ą║ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮąŠą╝čā ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÄ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ Cisco, ąĮą░ čüą▓ąŠąĖčģ čüą░ą╣čéą░čģ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čĆą░ą▒ąŠčéčŗ ą┐ąŠ "čüąĮčÅčéąĖčÄ" ąĖ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÄ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ą┐ąŠčĆčéčĆąĄč鹊ą▓ ą┐ąŠą╝ąĄčēąĄąĮąĖą╣ ąĖ ąĘąŠąĮ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüąĄčéąĖ IEEE 802.11a/g/n ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ą┐ąŠą╗ą│ąŠą┤ą░ [11].
ąĪąŠą▒ą╗čÄą┤ąĄąĮąĖąĄ ą▓čüąĄčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ Wi-Fi RTLS ą┐čĆąĖą▓ąŠą┤čÅčé ą║ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą╝čā ą▓ąŠąĘčĆą░čüčéą░ąĮąĖčÄ čüč鹊ąĖą╝ąŠčüčéąĖ čĆąĄčłąĄąĮąĖą╣, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ą▒čÄą┤ąČąĄčéą░ čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą╣ čüąĖčüč鹥ą╝čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ąŠčéąĮąŠčüąĖčéčīčüčÅ ą║ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗą╝ ą▓čŗčłąĄ čäą░ą║č鹊čĆą░ą╝. ąóą░ą║ąČąĄ čüą╗ąĄą┤čāąĄčé čāčćąĖčéčŗą▓ą░čéčī, čćč鹊 ąĮąĄ ą▓čüąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ čüčéą░ąĮą┤ą░čĆčéą░ IEEE 802.11a/g/n, ą▓ą▓ąŠąĘąĖą╝ąŠąĄ ą▓ čüčéčĆą░ąĮčā, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ čüąĄč鹥ą╣ ą╝ą░ą╗ąŠą│ąŠ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ, čćč鹊 ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĮą░ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ.
ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠ čüąĖą│ąĮą░ą╗ą░ą╝ ą░ą▓č鹊ąĮąŠą╝ąĮčŗčģ "ąĘą░ą║ą╗ą░ą┤ąŠą║-ą╝ą░čÅą║ąŠą▓"
ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ąĮąĄą┤čĆąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą░ą▓č鹊ąĮąŠą╝ąĮčŗčģ "ąĘą░ą║ą╗ą░ą┤ąŠą║-ą╝ą░čÅą║ąŠą▓", čüą╗ąĄą┤čāąĄčé čāčćąĖčéčŗą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ:
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ Ultra Wideband
ąÆ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ Ultra Wideband (UWB) ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą║ąŠčĆąŠčéą║ąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ čłąĖčĆąĖąĮąŠą╣ čüą┐ąĄą║čéčĆą░. ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮąŠąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ čäą░ąĘčŗ, ą┐ąŠąĘąĖčåąĖąĖ ąĖ/ąĖą╗ąĖ čćą░čüč鹊čéčŗ ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖ ą║ąŠą│ąĄčĆąĄąĮčéąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąĖą╗ąĖ ąĮąĄą║ąŠą│ąĄčĆąĄąĮčéąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ čüąĖą│ąĮą░ą╗ą░. UWB ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ čüąĖčüč鹥ą╝čŗ čü ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ ŌĆō ą┤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┤ąĄčüčÅčéą║ąŠą▓ čüą░ąĮčéąĖą╝ąĄčéčĆąŠą▓. ąĪčāčēąĄčüčéą▓čāčÄčé USB UWB-čāčüčéčĆąŠą╣čüčéą▓ą░ (čĆąĖčü. 2).

ąØąĄą┤ąŠčüčéą░čéą║ąĖ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ:
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ Bluetooth
ą¤čĆąĖąĮčÅčéąĖąĄ čüčéą░ąĮą┤ą░čĆčéą░ IEEE 802.15.1 Bluetooth ąŠą▒ąĄčüą┐ąĄčćąĖą╗ąŠ čĆą░ąĘą▓ąĖčéąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖą╣, čüą┐ąŠčüąŠą▒ąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ąŠą▒ą╝ąĄąĮ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą▓ čĆą░ą┤ąĖčāčüąĄ ą┤ąŠ 100 ą╝ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čüą░ą╝ąŠą│ąŠ čĆą░ąĘą╗ąĖčćąĮąŠą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ąĖ ą║ą╗ą░čüčüąŠą▓. ąÜąŠą╝ą┐ą░ą║čéąĮąŠčüčéčī ąĖ ąĮąĖąĘą║ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī ą╝ąŠą┤čāą╗ąĄą╣ Bluetooth čüčéą░ą╗ąĖ ąŠčüąĮąŠą▓ą░ąĮąĖąĄą╝ ą┤ą╗čÅ ą╝ąĮąŠą│ąŠčćąĖčüą╗ąĄąĮąĮčŗčģ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą╗ąŠą║ą░ą╗čīąĮčŗčģ čüąĖčüč鹥ą╝ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ ąĖčģ ąŠčüąĮąŠą▓ąĄ.
ąöą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ IEEE 802.15.1 ąĖčüą┐ąŠą╗čīąĘčāčÄčé č鹥čģąĮąŠą╗ąŠą│ąĖčÄ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čüą┐ąĄą║čéčĆą░ čüąŠ čüą║ą░čćą║ąŠąŠą▒čĆą░ąĘąĮąŠą╣ ą┐ąĄčĆąĄčüčéčĆąŠą╣ą║ąŠą╣ čćą░čüč鹊čéčŗ ŌĆō Frequency Hopping Spread Spectrum (FHSS). ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā čćą░čüč鹊čéą░ą╝ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąĖąĮčģčĆąŠąĮąĮąŠ, ąĄą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮą░ ąĖ ąĖąĘą▓ąĄčüčéąĮą░ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║čā, čāčćą░čüčéą▓čāčÄčēąĖą╝ ą▓ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ. ą¤ą░čĆčŗ ą┐čĆąĖąĄą╝ąĮąĖą║-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ čüąŠčüąĄą┤ąĮąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ąĮąĄ ą╝ąĄčłą░čÄčé ą┤čĆčāą│ ą┤čĆčāą│čā. ą¤čĆąŠč鹊ą║ąŠą╗ Bluetooth ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ "č鹊čćą║ą░-č鹊čćą║ą░" ąĖ "č鹊čćą║ą░-ą╝ąĮąŠą│ąŠč鹊čćą║ą░".
ąØąĄą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ Bluetooth ą▓ čüąĄčéčÅčģ čü ą┤čĆąĄą▓ąŠą▓ąĖą┤ąĮąŠą╣, ą╗ąĖąĮąĄą╣ąĮąŠą╣ (ą╝ąĮąŠą│ąŠąĘą▓ąĄąĮąĮąŠą╣) ąĖ MESH-č鹊ą┐ąŠą╗ąŠą│ąĖąĄą╣ (čüą░ą╝ąŠąŠčĆą│ą░ąĮąĖąĘčāčÄčēąĄą╣čüčÅ čÅč湥ąĖčüč鹊ą╣), ą░ čéą░ą║ąČąĄ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą╗ąĄą╝ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║č鹊ą▓ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ Bluetooth ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ąŠ ąŠčéą║ą░ąĘ ąŠčé ąĄą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ ąĘą░ą┤ą░čć ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ZigąÆee
ZigąÆee ŌĆō čŹč鹊 ąĮą░ąĘą▓ą░ąĮąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ, ą▓ą║ą╗čÄčćą░čÄčēąĄą╣ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą▓ąĄčĆčģąĮąĖčģ čāčĆąŠą▓ąĮąĄą╣, čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą║ąŠąĮčäąĖą┤ąĄąĮčåąĖą░ą╗čīąĮčāčÄ č鹥čģąĮąĖč湥čüą║čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ąŠą┐ąĖčĆą░čÄčēąĄą╣čüčÅ ąĮą░ čüčéą░ąĮą┤ą░čĆčé IEEE 802.15.4. ZigąÆee čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ, čéčĆąĄą▒čāčÄčēąĖą╝ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čüą▓čÅąĘąĖ ąĖ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ ąŠčé ą░ą▓č鹊ąĮąŠą╝ąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ. ąÆ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 2400 ą£ąōčå ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ZigBee ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čüą┐ąĄą║čéčĆą░ ą╝ąĄč鹊ą┤ąŠą╝ DSSS ŌĆō Direct Sequence Spread Spectrum.
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé Bluetooth, čāčüčéčĆąŠą╣čüčéą▓ą░ ZigBee (čĆąĖčü. 3) ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé čüąŠąĘą┤ą░ąĮąĖąĄ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮčŗčģ čüąĄč鹥ą╣ čü čüą░ą╝ąŠą╣ čĆą░ąĘą╗ąĖčćąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąŠą╣, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ č鹊ą┐ąŠą╗ąŠą│ąĖąĄą╣ MESH (čüą░ą╝ąŠąŠčĆą│ą░ąĮąĖąĘčāčÄčēą░čÅčüčÅ čÅč湥ąĖčüčéą░čÅ čüąĄčéčī čü čĆąĄčéčĆą░ąĮčüą╗čÅčåąĖąĄą╣ ąĖ ą╝ą░čĆčłčĆčāčéąĖąĘą░čåąĖąĄą╣ čüąŠąŠą▒čēąĄąĮąĖą╣). ąŁč鹊 ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ąŠ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓čŗ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ZigąÆee ą▓ č鹥čģąĮąŠą╗ąŠą│ąĖč湥čüą║ąĖčģ čüąĄčéčÅčģ ąĖ RTLS.

ąÆ čåąĄą╗ąŠą╝ ą║ ąŠčüąĮąŠą▓ąĮąŠą╝čā ąĮąĄą┤ąŠčüčéą░čéą║čā ZigąÆee ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ 菹║čüą┐ąĄčĆč鹊ą▓ ąŠčéąĮąŠčüčÅčé "ąĘą░ą║čĆčŗč鹊čüčéčī" čŹč鹊ą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ (ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čüą░ą╝ąŠą│ąŠ IEEE 802.15.4) ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ čüč鹊čĆąŠąĮąĮąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ą¤čĆąŠč鹊ą║ąŠą╗čŗ ZigąÆee ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ čćą╗ąĄąĮą░ą╝ ą░ą╗čīčÅąĮčüą░ ZigąÆee.
ąĪą╗ąŠąČąĖą╗ą░čüčī čüąĖčéčāą░čåąĖčÅ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ čüąĖčüč鹥ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ąĖ ąĖčģ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ą▓ ąĘą░ą║čĆčŗčéčŗčģ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░čģ čü ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░čüčī č鹥čģąĮąŠą╗ąŠą│ąĖčÅ, čĆąĄą░ą╗ąĖąĘčāčÄčēą░čÅ:
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ nanoLoc
ąÆ 2007 ą│. ą║ąŠą╝ą┐ą░ąĮąĖčÅ Nanotron Technologies GmbH (ąōąĄčĆą╝ą░ąĮąĖčÅ) čüąŠąĘą┤ą░ą╗ą░ č鹥čģąĮąŠą╗ąŠą│ąĖčÄ nanoLOC, ą░ ąĘą░č鹥ą╝ čüčéą░ąĮą┤ą░čĆčéąĖąĘąĖčĆąŠą▓ą░ą╗ą░ ąĄąĄ ą║ą░ą║ IEEE 802.15.4ą░. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ NanoLOC čüąŠčģčĆą░ąĮąĖą╗ąĖ ą▓čüąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ ZigąÆee ąĖ čüčāą╝ąĄą╗ąĖ ąŠą▒ąŠą╣čéąĖ ąĖą╝ąĄą▓čłąĖąĄčüčÅ čā ZigąÆee ąĮąĄą┤ąŠčüčéą░čéą║ąĖ.
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ nanoLOC čĆąĄą░ą╗ąĖąĘčāąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖą╣ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čüąĄčéąĖ. ą×ąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüčéčĆąŠąĖčéčī čĆą░ą┤ąĖąŠčüąĄčéąĖ ą╗čÄą▒ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▓čŗčüąŠą║čāčÄ č鹊čćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖą╝ąĄąĄčé ąŠčéą║čĆčŗčéčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą▒ąĖč鹊ą▓ą░čÅ čüą║ąŠčĆąŠčüčéčī 1 ą£ą▒ąĖčé/čü, ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čāą╗čāčćčłąĄąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą║ą░ąĮą░ą╗ą░ ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮą░ ą┤ąŠ 250 ą║ą▒ąĖčé/čü. ąÆ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ nanoLOC ąĘą░ą╗ąŠąČąĄąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░ ą│ąŠą╗ąŠčüąŠą▓čŗą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ąĖąĘą╝ąĄčĆąĄąĮąĖąĄą╝ čĆą░čüčüč鹊čÅąĮąĖą╣ ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ą░ą▒ąŠąĮąĄąĮčéą░. ąÜą░ą║ ąĖ ą▓ ZigąÆee, čćą░čüč鹊čéąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čĆą░ą▒ąŠčéčŗ nanoLOC 2400ŌĆō 2483,5 ą£ąōčå ą┐čĆąĖ čłąĖčĆąĖąĮąĄ čüą┐ąĄą║čéčĆą░ 80 ą£ąōčå. ąĀąŁąĪ (čĆąĖčü. 4) čéą░ą║ąČąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą╝ą░ą╗ąŠą│ąŠ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ, ąĄą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ąĮąĄ čéčĆąĄą▒čāąĄčé ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéąĮčŗčģ čĆą░ąĘčĆąĄčłąĄąĮąĖą╣ ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖą╣.
ąöą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ čāąĘą╗ąŠą▓ čüąĄčéąĖ nanoLOC ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 6-ą▒ą░ą╣č鹊ą▓čŗąĄ čćąĖčüą╗ą░, ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ čüąĖą│ąĮą░ą╗čŗ čü ą┐ą╗ą░ą▓ąĮąŠ ąĖąĘą╝ąĄąĮčÅčÄčēąĄą╣čüčÅ čćą░čüč鹊č鹊ą╣ ŌĆō CSS. ąÉą▓č鹊ą║ąŠčĆčĆąĄą╗čÅčåąĖąŠąĮąĮčŗąĄ čüą▓ąŠą╣čüčéą▓ą░ čüąĖą│ąĮą░ą╗ą░ ą┤ąĄą╗ą░čÄčé č鹥čģąĮąŠą╗ąŠą│ąĖčÄ čāčüč鹊ą╣čćąĖą▓ąŠą╣ ą║ ą▓ąĮąĄčłąĮąĖą╝ ą┐ąŠą╝ąĄčģą░ą╝.
ąś ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖą╣ čāąĘą╗ąŠą▓ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüąĄčéąĖ, ąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┤ąŠ č鹥ą│ąŠą▓ č鹊čćą║ąĖ ą┤ąŠčüčéčāą┐ą░ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčŗ IEEE 802.15.4ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮ čĆą░ą┤ąĖąŠąĖąĮč鹥čĆč乥ą╣čü ŌĆō nanoLOC.
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖą╣ ą▓ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ nanoLOC ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ąĄč鹊ą┤ą░ SDS-TWR (Symmetric Double Sided Two Way Ranging), ą▓čģąŠą┤čÅčēąĄą│ąŠ ą▓ ą│čĆčāą┐ą┐čā ą╝ąĄč鹊ą┤ąŠą▓ ToF. ą¤čĆąĖ ą╝ąĄč鹊ą┤ąĄ SDS-TWR ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąŠą▒ąĄąĖą╝ąĖ čüč鹊čĆąŠąĮą░ą╝ąĖ, ą░ ąĘą░č鹥ą╝ ą▒ąĄčĆąĄčéčüčÅ čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŁč鹊 ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāąĄčé čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čüą╗čāčćą░ąĄ "čāčģąŠą┤ą░" čåąĄąĮčéčĆą░ą╗čīąĮąŠą╣ čćą░čüč鹊čéčŗ.
ąŻčüč鹊ą╣čćąĖą▓ąŠčüčéčī č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą║ ą┐ąŠą╝ąĄčģą░ą╝, ąŠą▒čāčüą╗ąŠą▓ą╗ąĄąĮąĮą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčÅą╝ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓, ąŠą▒ąĄčüą┐ąĄčćąĖą╗ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║č鹊ą▓ ąĘą░ ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ ą┐ąĄčĆąĖą╝ąĄčéčĆą░ ąĘąŠąĮčŗ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čü ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗą╝ čüąĮąĖąČąĄąĮąĖąĄą╝ č鹊čćąĮąŠčüčéąĖ.
ą×č湥ąĮčī ą▓ą░ąČąĮčŗą╝ čüą▓ąŠą╣čüčéą▓ąŠą╝ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ nanoLOC čÅą▓ą╗čÅąĄčéčüčÅ ąŠčéą║čĆčŗč鹊čüčéčī čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ.
ą×čéą║čĆčŗč鹊čüčéčī ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüčćąĖčéą░čéčī č鹥čģąĮąŠą╗ąŠą│ąĖčÄ nanoLOC ąŠą┤ąĮąŠą╣ ąĖąĘ čüą░ą╝čŗčģ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓ąĮčŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ą▓ąĮąĄą┤čĆąĄąĮąĖčÅ čüąĖčüč鹥ą╝ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤čĆąĖ ą▓čŗą▒ąŠčĆąĄ čüąĖčüč鹥ą╝čŗ RTLS ąĮąĄ čüč鹊ąĖčé čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą▓ą░čéčīčüčÅ čāčéą▓ąĄčƹȹ┤ąĄąĮąĖčÅą╝ąĖ č鹊ą│ąŠ ąĖą╗ąĖ ąĖąĮąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąŠą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ, ąĘą░ą┤ą░čć, čāčüą╗ąŠą▓ąĖą╣ čĆą░ą▒ąŠčéčŗ ąĖ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓ ą╝ąŠą┤ąĄčĆąĮąĖąĘą░čåąĖąĖ ąĮčāąČąĮąŠ ą┤ąĄčéą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓čüąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čüąĖčüč鹥ą╝ąĄ, ą░ ąĘą░č鹥ą╝ čéčēą░č鹥ą╗čīąĮąŠ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ č鹥čģąĮąŠą╗ąŠą│ąĖą╣ ą┐ąŠ ąĖčģ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÄ čüčāčēąĄčüčéą▓čāčÄčēąĖą╝ ąĖ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓ąĮčŗą╝ ąĘą░ą┤ą░čćą░ą╝.
ą×čüąŠą▒ąĄąĮąĮąŠ čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ čäą░ą║č鹊čĆčŗ:
ąś čāąČąĄ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ąŠą▒ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ą▓čŗą▒ąŠčĆ.
ąŻčćąĖčéčŗą▓ą░čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┐ąŠ ąŠą▒čŖąĄą╝čā ą╝ą░č鹥čĆąĖą░ą╗ą░, ą░ą▓č鹊čĆ čüčéą░ą▓ąĖą╗ ą┐ąĄčĆąĄą┤ čüąŠą▒ąŠą╣ ąĘą░ą┤ą░čćčā ą▓čŗą┤ąĄą╗ąĖčéčī ąĮą░ąĖą▒ąŠą╗ąĄąĄ ąĘąĮą░čćą░čēąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ ąĖ ąĮąĄą┤ąŠčüčéą░čéą║ąĖ č鹥čģąĮąŠą╗ąŠą│ąĖą╣, ąĮą░čłąĄą┤čłąĖčģ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čłąĖčĆąŠą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą▓ čüąĖčüč鹥ą╝ą░čģ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ąĖ ąĘąŠąĮą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąøąĖč鹥čĆą░čéčāčĆą░
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ą¢čāčĆąĮą░ą╗ "ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ" #3, 2014
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 11359
ąĪčéą░čéčīąĖ ą┐ąŠ č鹥ą╝ąĄ
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ą║ąŠčĆą┐ąŠčĆą░čéąĖą▓ąĮąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣


